基于EKF的水下LD通信精对准控制算法  下载: 550次
下载: 550次
Alignment Control Algorithm of Underwater LD Communication Based on EKF
图 & 表
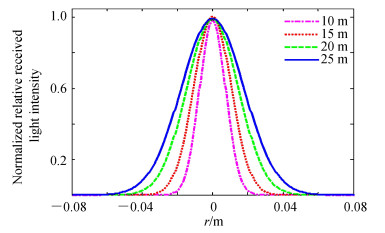
图 1. The normalized intensity distribution under different transmission distances
Fig. 1. The normalized intensity distribution under different transmission distances
下载图片 查看原文
图 2. Alignment diagram of receiver and transmitter of UOWC system
Fig. 2. Alignment diagram of receiver and transmitter of UOWC system
下载图片 查看原文
图 3. Algorithm control flow chart
Fig. 3. Algorithm control flow chart
下载图片 查看原文
图 4. Spot detection experiment system
Fig. 4. Spot detection experiment system
下载图片 查看原文
图 5. Spot detection experiment system
Fig. 5. Spot detection experiment system
下载图片 查看原文
图 6. The convergence of the estimate state and the actual state
Fig. 6. The convergence of the estimate state and the actual state
下载图片 查看原文
图 7. Change of state x2 at different transmission distances
Fig. 7. Change of state x2 at different transmission distances
下载图片 查看原文
图 8. Alignment error at different transmission distances
Fig. 8. Alignment error at different transmission distances
下载图片 查看原文
表 1蒙特卡洛数值仿真参数
Table1. Monte Carlo numerical simulation parameters
| Parameters | Value | | Number of photons | 2×106 | | Wavelength λ/nm | 520 | | Beam width/waist radius at/mm | 0.789 | | Divergent half angle θ/mrad | 1 | | Receiving surface radius ar/mm | 1.5 | | Seawater overall attenuation loss coefficient c/m-1 | 0.151 |
|
查看原文
表 2拟合函数参数
Table2. Fitting function parameters
| Transmission distance d/m | 10 | 15 | 20 | 25 | | a | 0.982 1 | 1.005 0 | 0.987 5 | 0.993 1 | | b | 0.010 5 | 0.015 1 | 0.020 8 | 0.025 3 |
|
查看原文
表 3EKF算法初始化参数
Table3. EKF algorithm simulation initialization parameters
| Parameter | Description | Value | | \begin{document}${{\overset{\wedge }{\mathop{\boldsymbol{x}}}\, }_{\text{ }0\text{ }|\text{ }0}}$\end{document} | Initial time state estimate | [2, 0]T | | P0|0 | Initial error covariance matrix | \begin{document}$\left[\begin{array}{ll}
1 & 0 \\
0 & 5
\end{array}\right]$\end{document} |
|
查看原文
表 4光斑半径、对准误差、接收效率与传输距离的关系
Table4. Relationship between spot radius, alignment error, receiving efficiency and transmission distance
| Transmission distance/m | Alignment error/m | Receiving efficiency η | | 15 | 0.001 3 | 98.75% | | 20 | 0.001 5 | 98.65% | | 25 | 0.001 9 | 99.01% |
|
查看原文
刘豪, 杨祎, 阴亚芳, 张建磊, 李思静. 基于EKF的水下LD通信精对准控制算法[J]. 光子学报, 2020, 49(4): 0406003. Hao LIU, Yi YANG, Ya-fang YIN, Jian-lei ZHANG, Si-jing LI. Alignment Control Algorithm of Underwater LD Communication Based on EKF[J]. ACTA PHOTONICA SINICA, 2020, 49(4): 0406003.









 PDF全文
PDF全文
