基于多尺度特征和PointNet的LiDAR点云地物分类方法  下载: 1815次
下载: 1815次
Terrain Classification of LiDAR Point Cloud Based on Multi-Scale Features and PointNet
1 空军工程大学信息与导航学院, 陕西 西安 710077
2 东北电力大学理学院, 吉林 吉林 132000
图 & 表
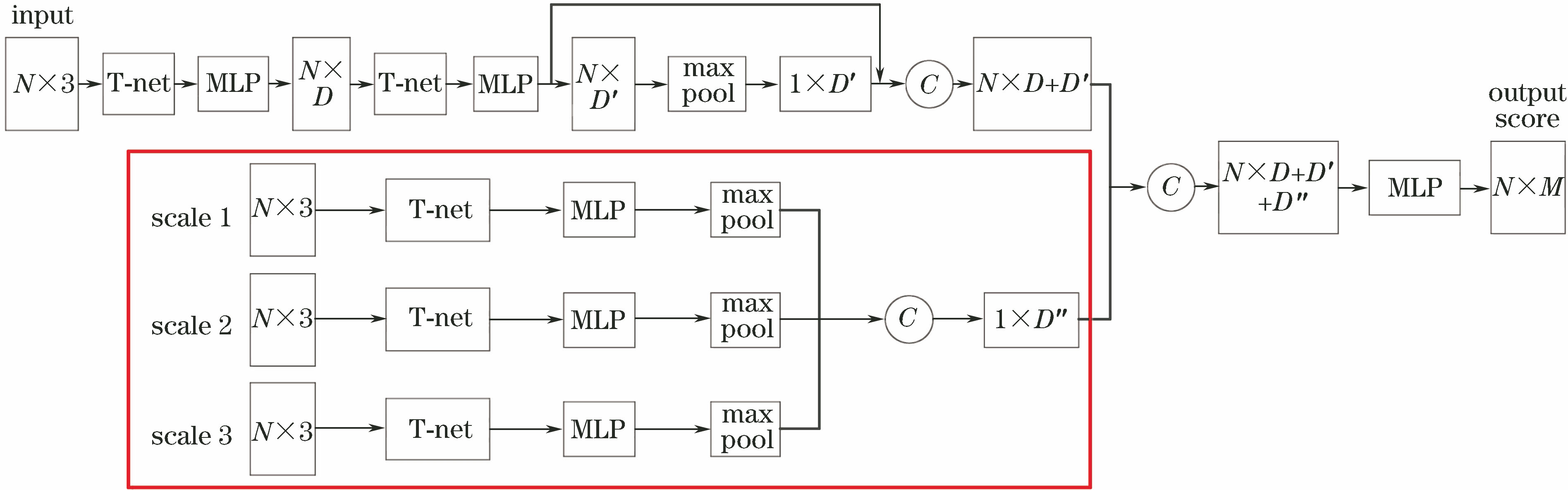
图 1. 多尺度特征与PointNet结合的深度神经网络模型
Fig. 1. Deep neural network model combining multiscale features with PointNet
下载图片 查看原文
图 2. PointNet网络架构
Fig. 2. PointNet network architecture
下载图片 查看原文
图 3. 点云中不同尺度下的邻域。(a)尺度一;(b)尺度二;(c)尺度三
Fig. 3. Neighbors of different scales in point clouds. (a) Scale 1; (b) scale 2; (c) scale 3
下载图片 查看原文
图 4. Semantic 3D数据集的点云。(a)区域1;(b)区域2
Fig. 4. Point cloud of Semantic 3D dataset. (a) Area 1; (b) area 2
下载图片 查看原文
图 5. Vaihingen城市数据集的点云。(a)区域1;(b)区域2;(c)区域3
Fig. 5. Point cloud of Vaihingen city dataset. (a) Area 1; (b) area 2; (c) area 3
下载图片 查看原文
图 6. Semantic 3D数据集的分类结果。(a)输入点云;(b) PointNet;(c)所提算法
Fig. 6. Classification results of Semantic 3D dataset. (a) Input point cloud; (b) PointNet; (c) proposed algorithm
下载图片 查看原文
图 7. Vaihingen城市数据集的分类结果。(a)输入点云;(b) PointNet;(c)所提算法
Fig. 7. Classification results of Vaihingen city dataset. (a) Input point cloud; (b) PointNet; (c) proposed algorithm
下载图片 查看原文
表 1不同尺度下的实验结果
Table1. Experimental results of different scales
| Scale | s=2 | s=3 | s=4 |
|---|
| Multi-scale | 90.7 | 89.8 | 89.2 | | Scale 1 | 85.2 | 85.2 | 85.2 | | Scale 2 | 86.4 | 87.3 | 86.1 | | Scale 3 | 86.1 | 84.9 | 84.3 |
|
查看原文
表 2Semantic 3D数据集的各类别IoU
Table2. Each category IoU of Semantic 3D dataset%
| Algorithm | MeanIoU | Man-madeterrain | Naturalterrain | Highvegetation | Lowvegetation | Buildings | Hardscape | Scanningartefacts | Cars |
|---|
| Ref. [22] | 58.5 | 85.6 | 83.2 | 74.2 | 32.4 | 89.7 | 18.5 | 25.1 | 59.2 | | Ref. [23] | 59.1 | 82.0 | 77.3 | 79.7 | 22.9 | 91.1 | 18.4 | 37.3 | 64.4 | | Ref. [24] | 61.3 | 83.9 | 66.0 | 86.0 | 40.5 | 91.1 | 30.9 | 27.5 | 64.3 | | Proposed | 67.4 | 85.6 | 87.1 | 90.5 | 42.3 | 93.2 | 31.6 | 40.8 | 67.8 |
|
查看原文
表 3Semantic 3D数据集的分类精度以及运行时间
Table3. Classification accuracy and runtime of Semantic 3D dataset
| Algorithm | MeanIoU /% | Overallaccuracy /% | Runtime /s |
|---|
| Ref. [22] | 58.5 | 88.9 | - | | Ref. [23] | 59.1 | 88.6 | 3600.00 | | Ref. [24] | 61.3 | 88.1 | 1881.00 | | Proposed | 67.4 | 90.7 | 4300.00 |
|
查看原文
表 4Vaihingen城市数据集的各类别IoU
Table4. Each category IoU of Vaihingen city dataset%
| Algorithm | MeanIoU /% | Power line | Car | Lowvegetation | Impervioussurfaces | Roof | Fence /hedge | Facade | Shrub | Tree |
|---|
| PointNet | 32.0 | 0.8 | 23.2 | 32.1 | 47.6 | 84.7 | 2.3 | 5.7 | 15.4 | 76.2 | | Proposed | 34.9 | 1.2 | 34.3 | 36.9 | 49.3 | 86.8 | 2.6 | 4.8 | 13.3 | 85.7 |
|
查看原文
表 5Vaihingen城市数据集的分类精度以及运行时间
Table5. Classification accuracy and runtime of Vaihingen city dataset
| Algorithm | Mean IoU /% | Overall accuracy /% | Average class accuracy /% | Runtime /s |
|---|
| PointNet | 32.0 | 65.2 | 38.1 | 1500.00 | | Proposed | 34.9 | 74.3 | 43.6 | 2300.00 |
|
查看原文
赵中阳, 程英蕾, 释小松, 秦先祥, 李鑫. 基于多尺度特征和PointNet的LiDAR点云地物分类方法[J]. 激光与光电子学进展, 2019, 56(5): 052804. Zhongyang Zhao, Yinglei Cheng, Xiaosong Shi, Xianxiang Qin, Xin Li. Terrain Classification of LiDAR Point Cloud Based on Multi-Scale Features and PointNet[J]. Laser & Optoelectronics Progress, 2019, 56(5): 052804.









 PDF全文
PDF全文

