光学学报, 2019, 39 (10): 1001003, 网络出版: 2019-10-09
基于水面特征波纹的水下运动目标Radon变换探测方法  下载: 1299次
下载: 1299次
Radon Transform Detection Method for Underwater Moving Target Based on Water Surface Characteristic Wave
图 & 表
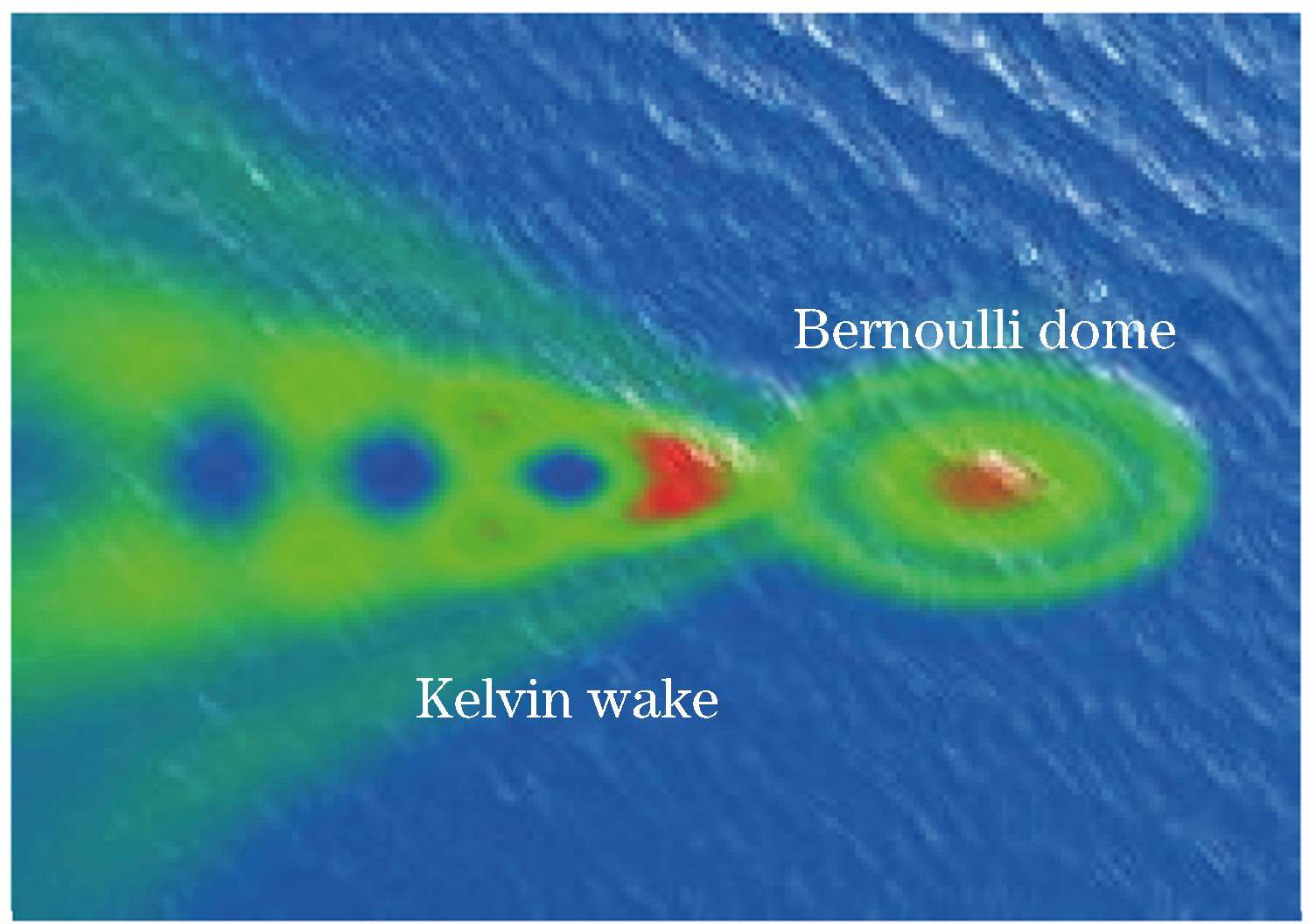
图 2. 舰船的水面尾迹及其尾迹组成分量。(a)实际舰船尾迹;(b)尾迹组成分量的几何关系
Fig. 2. Ship's wake and components of the wake. (a) Actual ship's wake; (b) geometric relationship of wake components

图 3. 水深15 m条件下不同分速的水面波纹。(a) v =9 m/s;(b) v =10 m/s;(c) v =11 m/s;(d) v =12 m/s;(e) v =13 m/s;(f) v =14 m/s;(g) v =15 m/s;(h) v =16 m/s;(i) v =17 m/s;(j) v =18 m/s;(k) v =20 m/s;(l) v =25 m/s
Fig. 3. Surface waves with different wind speeds at water depth of 15 m. (a) v =9 m/s; (b) v =10 m/s; (c) v =11 m/s; (d) v =12 m/s; (e) v =13 m/s; (f) v =14 m/s; (g) v =15 m/s; (h) v =16 m/s; (i) v =17 m/s; (j) v =18 m/s; (k) v =20 m/s; (l) v =25 m/s

图 4. 不同风速下的三维海面模拟。(a) u 19. 5=3 m/s;(b) u 19. 5=5 m/s;(c) u 19. 5=7 m/s;(d) u 19. 5=10 m/s
Fig. 4. Three-dimensional sea surface simulation images under different wind speeds. (a) u 19. 5=3 m/s; (b) u 19. 5=5 m/s; (c) u 19. 5=7 m/s; (d) u 19. 5=10 m/s

图 5. 不同风速下的海面混合波纹模拟图像。(a) u 19. 5=1 m/s;(b) u 19. 5=2 m/s;(c) u 19. 5=3 m/s;(d) u 19. 5=4 m/s;(e) u 19. 5=5 m/s;(f) u 19. Fig. 5. Mixed wave simulation images of sea surface under different wind speeds. (a) u 19. 5=1 m/s; (b) u 19. 5=2 m/s; (c) u 19. 5=3 m/s; (d) u 19. 5=4 m/s; (e) u 19. 5=5 m/s; (f) 
Fig. 5. Mixed wave simulation images of sea surface under different wind speeds. (a) u 19. 5=1 m/s; (b) u 19. 5=2 m/s; (c) u 19. 5=3 m/s; (d) u 19. 5=4 m/s; (e) u 19. 5=5 m/s; (f)
图 6. Radon变换几何原理示意图。(a) Radon空间域;(b) Radon变换域
Fig. 6. Geometric schematic diagram of Radon transform. (a) Radon space domain; (b) Radon transform domain

图 7. 对称直线的Radon变换效果图。(a)对称直线Radon空间域;(b)对称直线Radon变换域;(c)平行对称直线Radon空间域;(d)平行对称直线Radon变换域
Fig. 7. Radon transform diagrams of symmetric lines. (a) Radon space domain of symmetric straight lines; (b) Radon transform domain of symmetric straight lines; (c) Radon space domain of parallel symmetric straight lines; (d) Radon transform domain of parallel symmetric straight lines

图 8. 不同运动速度下尾迹模拟图的Radon变换域峰值点。(a) v =9 m/s;(b) v =17 m/s;(c) v =25 m/s
Fig. 8. Peak points of simulated wake at different movement velocities in Radon transform domain. (a) v =9 m/s; (b) v =17 m/s; (c) v =25 m/s

图 9. 不同运动速度下尾迹模拟图的Radon逆变换结果。(a) v =9 m/s;(b) v =17 m/s;(c) v =25 m/s
Fig. 9. Inverse-Radon transform results of simulated wake at different movement velocities. (a) v =9 m/s; (b) v =17 m/s; (c) v =25 m/s

图 10. 叠加海浪波情况下的Radon空间域及其逆变换图像(u 19.5=6 m/s,v =25 m/s)。(a) Radon空间域图像;(b)逆变换图像
Fig. 10. Radonspace domain and inverse-Radon images in the case of superimposed wave (u 19.5=6 m/s,v =25 m/s). (a) Radon space domain image; (b) inverse-Radon image

图 11. 基于Radon变换的复杂海面尾迹提取算法流程图
Fig. 11. Flow chart of extracting wake from complex sea based on Radon transform

图 12. 预处理后的标准图像(u 19.5=6 m/s)。(a) v =9 m/s;(b) v =17 m/s;(c) v =25 m/s
Fig. 12. Standard images after preprocessing (u 19.5=6 m/s). (a) v =9 m/s; (b) v =17 m/s; (c) v =25 m/s

图 13. 预处理前、后图像的Radon空间域(u 19.5=6 m/s)。(a) v =9 m/s;(b) v =17 m/s;(c) v =25 m/s
Fig. 13. Radon space domains of pre- and post-preprocessing images (u 19.5=6 m/s). (a) v =9 m/s; (b) v =17 m/s; (c) v =25 m/s

图 14. 双邻域窗口法提取Radon空间域局部峰值点。(a) v =9 m/s;(b) v =17 m/s;(c) v =25 m/s
Fig. 14. Double neighborhood window method for extracting peak points in Radon space domian. (a) v =9 m/s; (b) v =17 m/s; (c) v =25 m/s

图 15. Radon逆变换图像。(a) v =9 m/s;(b) v =17 m/s;(c) v =25 m/s
Fig. 15. Inverse-Radon transform images. (a) v =9 m/s; (b) v =17 m/s; (c) v =25 m/s

图 16. 小波变换效果图。(a)尾迹截面;(b)噪音截面
Fig. 16. Wavelet transformation diagrams. (a) Wake section; (b) noise section

图 17. 决策后Radon空间的域峰值点。(a) v =9 m/s;(b) v =17 m/s;(c) v =25 m/s
Fig. 17. Peak points in Radon space after decision. (a) v =9 m/s; (b) v =17 m/s; (c) v =25 m/s


表 1训练集和测试集的模型准确率数据
Table1. Model accuracy data for train set and test set
| |||||||||||||||||||||||||||||||||||
徐曼, 裘溯, 金伟其, 杨洁, 郭宏. 基于水面特征波纹的水下运动目标Radon变换探测方法[J]. 光学学报, 2019, 39(10): 1001003. Man Xu, Su Qiu, Weiqi Jin, Jie Yang, Hong Guo. Radon Transform Detection Method for Underwater Moving Target Based on Water Surface Characteristic Wave[J]. Acta Optica Sinica, 2019, 39(10): 1001003.



 PDF全文
PDF全文

