基于地理位置信息的图像配准方法及精度分析  下载: 1019次
下载: 1019次
Image Registration Method Based on Geo-Location Information and Precision Analysis
1 中国科学院长春光学精密机械与物理研究所, 吉林 长春 130033
2 中国科学院大学, 北京 100049
图 & 表
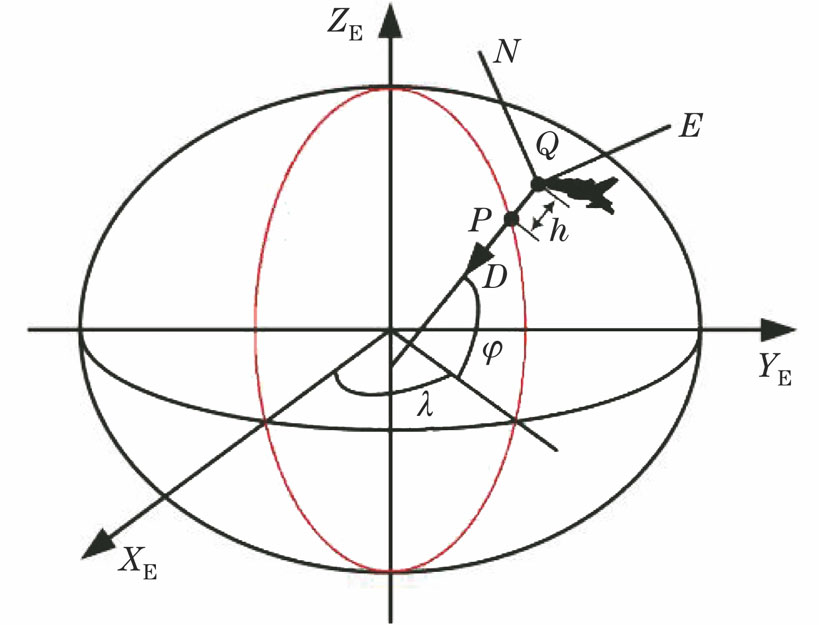
图 1. 地球坐标系与地理坐标系
Fig. 1. Schematic of ECEF coordinate and NED coordinate
下载图片 查看原文
图 2. 地理坐标系和载机坐标系示意图
Fig. 2. Schematic of NED coordinate and AC coordinate
下载图片 查看原文
图 3. 航空相机结构示意图
Fig. 3. Diagram of aerial camera
下载图片 查看原文
图 4. 航空相机坐标系
Fig. 4. Schematic of aerial camera coordinate
下载图片 查看原文
图 5. 配准点在CCD上的投影示意图
Fig. 5. Schematic of matching point projecting on CCD
下载图片 查看原文
图 6. 航空遥感图像的拍摄区域
Fig. 6. Shooting area of aerial remote sensing image
下载图片 查看原文
图 7. 航空遥感图像配准示意图
Fig. 7. Diagram of aerial remote sensing image registration
下载图片 查看原文
图 8. 配准点选取流程图
Fig. 8. Flow chart of selecting matching point
下载图片 查看原文
图 9. 定位点及其误差概率分布图。(a)定位点分布;(b)纬度误差概率分布;(c)经度误差概率分布
Fig. 9. Distribution of geo-location point and its error probability. (a) Distribution of geo-location point; (b) distribution of latitude error probability; (c) distribution of longitude error probability
下载图片 查看原文
图 10. 目标定位圆概率误差随摆扫角度变化曲线
Fig. 10. Circular error probability of geo-location with different gimbal roll angles
下载图片 查看原文
图 11. 配准点在CCD上的投影分布。(a)第一幅图像;(b)第二幅图像
Fig. 11. Distribution of matching point projecting on CCD. (a) The first image; (b) the second image
下载图片 查看原文
图 12. 两幅航空遥感图像的配准点在CCD上投影的相对分布
Fig. 12. Relative distribution of matching point projecting on CCD in two aerial remote sensing images
下载图片 查看原文
图 13. 地面景物图像配准结果
Fig. 13. Registration results of ground scenery image
下载图片 查看原文
图 14. 两组海洋航空遥感图像配准
Fig. 14. Registration results of two ocean aerial remote sensing images
下载图片 查看原文
表 1目标定位仿真实验数据
Table1. Data in geo-location simulation program
| Symbol | Nominal value | Standard deviation |
|---|
| Aircraft GPS position | /(°) | 35.0215 | 0.0001 | | /(°) | 121.6955 | 0.0001 | | /m | 2000 | 5 | | Aircraft attitude | ψ /(°) | 45.50 | 0.02 | | θ /(°) | 3.50 | 0.01 | | φ /(°) | 0.00 | 0.01 | | Gimbal angle | /(°) | -0.50 | 0.01 | | /(°) | 18.000 | 0.006 | | /(°) | -2.600 | 0.006 |
|
查看原文
表 2图像配准仿真实验数据
Table2. Data in image registration simulation experiment
| Symbol | Nominal value (photo1) | Nominal value (photo2) | Standard deviation | Relative standard deviation |
|---|
| Aircraft GPS position | /(°) | 35.0215 | 35.0216 | 0.0001 | 0.00002 | | /(°) | 121.6955 | 121.6956 | 0.0001 | 0.00002 | | /m | 2000 | 2003 | 5 | 1 | | Aircraft attitude | ψ /(°) | 45.50 | 45.80 | 0.02 | 0.01 | | θ /(°) | 3.500 | 3.600 | 0.01 | 0.005 | | φ /(°) | 0.00 | 0.00 | 0.01 | 0.005 | | Gimbal angle | /(°) | -0.50 | -0.70 | 0.01 | 0.01 | | /(°) | 18.000 | 6.000 | 0.006 | 0.006 | | /(°) | -2.600 | -6.800 | 0.006 | 0.006 |
|
查看原文
表 3配准结果与Google Earth比较
Table3. Comparison of the registration results with the Google Earth
| Sample number | 1 | 2 | 3 | 4 |
|---|
| Matching point position | Latitude /(°) | 18.27448 | 18.27433 | 18.27430 | 18.27414 | | Longitude /(°) | 109.51244 | 109.51246 | 109.51250 | 109.51244 | | Google Earth position | Latitude /(°) | 18.27429 | 18.27413 | 18.27410 | 18.27391 | | Longitude /(°) | 109.51221 | 109.51224 | 109.51228 | 109.51225 | | Position error /m | 32.15 | 32.11 | 31.36 | 31.78 |
|
查看原文
表 4两组海洋航空遥感图像定位及配准结果
Table4. Geo-location and registration results of two ocean aerial remote sensing images
| Sample number | Fig. 14(a1) | Fig. 14(a2) | Fig. 14(b1) | Fig. 14(b2) |
|---|
| AC altitude /m | 2043.1 | 2043.1 | 1997.3 | 1997.3 | | Roll gimbal angle /(°) | 6.17 | 18.13 | -17.96 | -6.05 | | Geo-location of boat | Latitude /(°) | 35.02716 | 35.02715 | 35.06437 | 35.06435 | | Longitude /(°) | 121.69073 | 121.69076 | 121.71215 | 121.71216 | | Geo-location error /m | 26.80 | 29.60 | 28.31 | 26.12 | | Registration error /m | 2.95 | 2.40 | | Registration error /pixel | 10.61 | 8.82 |
|
查看原文
乔川, 丁亚林, 许永森, 姚园, 王浩. 基于地理位置信息的图像配准方法及精度分析[J]. 光学学报, 2017, 37(8): 0828001. Chuan Qiao, Yalin Ding, Yongsen Xu, Yuan Yao, Hao Wang. Image Registration Method Based on Geo-Location Information and Precision Analysis[J]. Acta Optica Sinica, 2017, 37(8): 0828001.
















 PDF全文
PDF全文

