基于深度学习的车位智能检测方法  下载: 1580次
下载: 1580次
Method for Intelligent Detection of Parking Spaces Based on Deep Learning
1 武汉理工大学资源与环境工程学院, 湖北 武汉 430079
2 重庆市计量质量检测研究院, 重庆 401120
3 武汉理工大学图书馆, 湖北 武汉 430079
图 & 表
图 1. 车位识别流程
Fig. 1. Flow chart of parking space recognition
下载图片 查看原文
图 2. 车辆模型部分图像。(a)侧视角;(b)俯视角
Fig. 2. Partial images of car models. (a) Side view; (b) top view
下载图片 查看原文
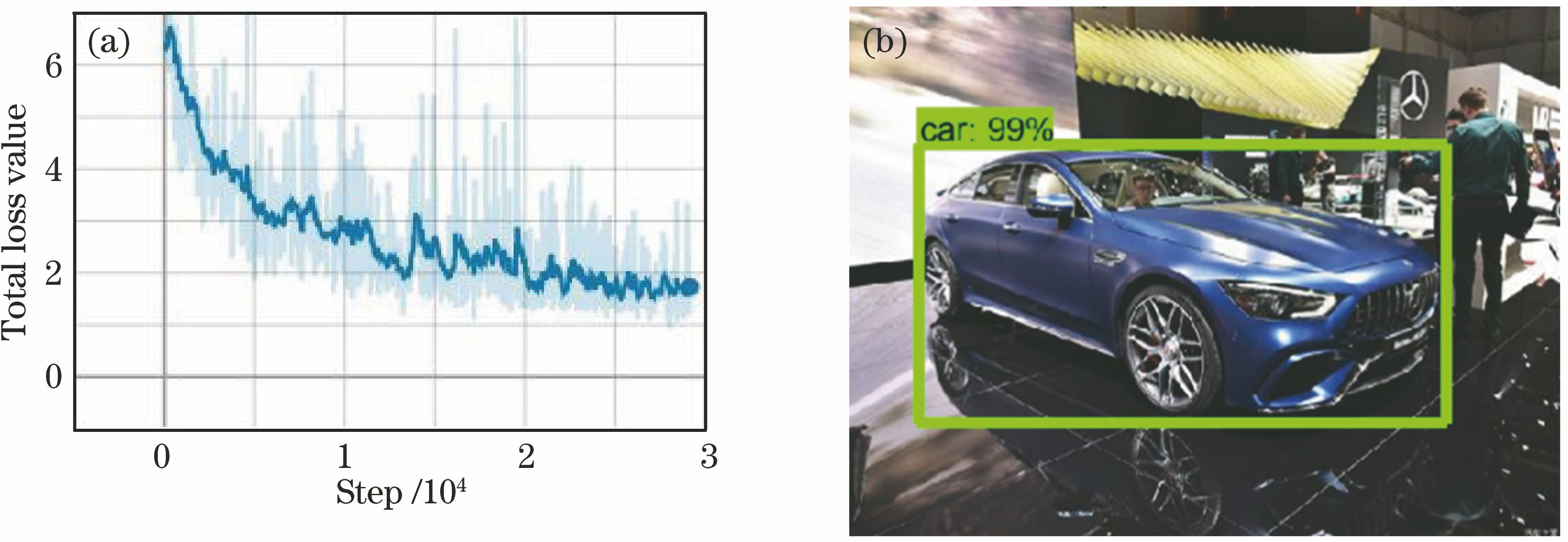
图 3. 总损失值的模拟分析结果
Fig. 3. Simulated result of total loss value
下载图片 查看原文
图 4. 训练模型对汽车模型的识别效果。(a)部分验证评估识别;(b)(c)测试目标识别模型;(d)筛选识别的结果
Fig. 4. Recognition effects of training models on car models. (a) Identification of partial verification assessments; (b)(c) test object recognition model; (d) results by filtering and recognition
下载图片 查看原文
图 5. 对深度可分离卷积核某层进行BN处理时β的分布图
Fig. 5. Distribution of β in BN processing of one layer in depthwise separable convolution kernel
下载图片 查看原文
图 6. 模拟满车位时的识别
Fig. 6. Recognition when simulating full parking space
下载图片 查看原文
图 7. 车位数据排序编号后的可视化。(a)数据分层法处理前;(b)数据分层法处理后
Fig. 7. Visualization after sorting and numbering of parking space data. (a) Before using data layering method; (b) after using data layering method
下载图片 查看原文
图 8. 车位占用帧图像
Fig. 8. Frame image about parking space occupancy
下载图片 查看原文
图 9. 车辆识别数据的可视化
Fig. 9. Visualization of car identification data
下载图片 查看原文
图 10. 空车位概率判断模型。(a)空车位判断示意图;(b)流程
Fig. 10. Probability discriminant model for empty parking spaces. (a) Schematic for discriminating empty parking space; (b) flow chart
下载图片 查看原文
图 11. 车位检测结果输出
Fig. 11. Output of parking space detection results
下载图片 查看原文
图 12. 利用Canny算子对不同环境下车辆的边缘检测。(a)对图4(a)的边缘检测结果;(b)对图6的边缘检测结果
Fig. 12. Edge detection of cars in different environments by Canny operator. (a) Edge detection result of Fig. 4(a); (b) edge detection result of Fig. 6
下载图片 查看原文
图 13. 实例验证中模型训练及验证。(a)总损失值的变化情况;(b)经25000次迭代训练后的识别效果
Fig. 13. Model training and verification in case verification. (a) Change in total loss value; (b) recognition effect after iterative training for 25000 times
下载图片 查看原文
图 14. 停车位识别。(a)满车位帧图像;(b)车位识别数据的可视化
Fig. 14. Parking space recognition. (a) Frame image of full parking space; (b) visualization of identification data for parking spaces
下载图片 查看原文
图 15. 某时间点空车位的检测。(a)停车场的车位占用情况;(b)识别车辆对车位的覆盖情况;(c)车位检测结果输出
Fig. 15. Detection of empty parking spaces at some time point. (a) Parking space occupancy; (b) recognized car coverage of parking spaces; (c) output of parking space detection results
下载图片 查看原文
图 16. 停车位识别。(a)满车位帧图像;(b)车位识别数据的可视化
Fig. 16. Parking space identification. (a) Frame image of full parking space; (b) visualization of identification data for parking spaces
下载图片 查看原文
图 17. 某时间点空车位检测。(a)车位占用情况;(b)识别车辆对车位的覆盖情况;(c)车位检测结果输出
Fig. 17. Detection of empty parking spaces at some time point. (a) Parking space occupancy; (b) recognized car coverage of parking spaces; (c) output of parking space detection results
下载图片 查看原文
表 1COCO训练的部分模型
Table1. COCO-trained partial models
| Model name | Speed /ms | COCO mAP[^1] |
|---|
| ssd_mobilenet_v1_coco | 30 | 21 | | ssd_resnet_50_fpn_coco | 76 | 35 | | ssd_inception_v2_coco | 42 | 24 | | ssdlite_mobilenet_v2_coco | 27 | 22 | | faster_rcnn_inception_v2_coco | 58 | 28 | | faster_rcnn_resnet50_coco | 89 | 30 | | rfcn_resnet101_coco | 92 | 30 |
|
查看原文
表 2MobileNet模型与通用模型的对比
Table2. Comparison between MobileNet and popular models
| Model | 1.0 MobileNet-224 | GoogleNet | VGG16 |
|---|
| ImageNetaccuracy /% | 70.6 | 69.8 | 71.5 |
|
查看原文
表 3图像中车辆模型的对象框信息
Table3. Information related to car model object boxes in images
| Image name | ymin | xmin | ymax | xmax | Score |
|---|
| Image1 | 523.6484 | 655.9752 | 801.9327 | 835.4104 | 0.991868 | | Image1 | 516.6836 | 879.7378 | 798.6421 | 1052.4520 | 0.989354 | | Image1 | 186.7453 | 1096.5340 | 453.7570 | 1286.1600 | 0.969670 | | Image1 | 460.5099 | 1356.4590 | 787.1250 | 1564.1680 | 0.962921 | | Image1 | 532.6093 | 380.7485 | 797.8188 | 583.7634 | 0.954729 | | Image1 | 530.2592 | 172.1902 | 820.0494 | 370.5828 | 0.938664 | | Image1 | 504.3114 | 1121.151 | 797.4492 | 1299.8860 | 0.928651 | | Image1 | 216.4648 | 663.6877 | 448.5158 | 836.6179 | 0.928011 | | Image1 | 237.4085 | 212.8660 | 490.6271 | 431.8626 | 0.926269 | | Image1 | 204.6493 | 882.5272 | 440.2206 | 1059.1580 | 0.925088 | | Image1 | 235.2376 | 433.7274 | 472.4123 | 626.4663 | 0.907685 | | Image1 | 186.3284 | 1324.633 | 460.8913 | 1522.1950 | 0.815933 |
|
查看原文
表 4车位信息的Timsort算法排序编号结果
Table4. Sorting and numbering results of parking space information by Timsort algorithm
| Parking number | ymin | xmin | ymax | xmax | Score |
|---|
| 1 | 186.7453 | 1096.5340 | 453.7570 | 1286.1600 | 0.969670 | | 2 | 186.3284 | 1324.6330 | 460.8913 | 1522.1950 | 0.815933 | | 3 | 204.6493 | 882.5272 | 440.2206 | 1059.1580 | 0.925088 | | 4 | 216.4648 | 663.6877 | 448.5158 | 836.6179 | 0.928011 | | 5 | 235.2376 | 433.7274 | 472.4123 | 626.4663 | 0.907685 | | 6 | 237.4085 | 212.8660 | 490.6271 | 431.8626 | 0.926269 | | 7 | 460.5099 | 1356.4590 | 787.1250 | 1564.1680 | 0.962921 | | 8 | 504.3114 | 1121.1510 | 797.4492 | 1299.8860 | 0.928651 | | 9 | 516.6836 | 879.7378 | 798.6421 | 1052.4520 | 0.989354 | | 10 | 523.6484 | 655.9752 | 801.9327 | 835.4104 | 0.991868 | | 11 | 530.2592 | 172.1902 | 820.0494 | 370.5828 | 0.938664 | | 12 | 532.6093 | 380.7485 | 797.8188 | 583.7634 | 0.954729 |
|
查看原文
表 5Timsort算法结合数据分层法的排序编号结果
Table5. Sorting and numbering results by Timsort algorithm combined with data layering method
| Parking number | ymin | xmin | ymax | xmax | Scores | Data layer |
|---|
| 1 | 237.4085 | 212.8660 | 490.6271 | 431.8626 | 0.926269 | 0 | | 2 | 235.2376 | 433.7274 | 472.4123 | 626.4663 | 0.907685 | 0 | | 3 | 216.4648 | 663.6877 | 448.5158 | 836.6179 | 0.928011 | 0 | | 4 | 204.6493 | 882.5272 | 440.2206 | 1059.1580 | 0.925088 | 0 | | 5 | 186.7453 | 1096.5340 | 453.7570 | 1286.1600 | 0.969670 | 0 | | 6 | 186.3284 | 1324.6330 | 460.8913 | 1522.1950 | 0.815933 | 0 | | 7 | 530.2592 | 172.1902 | 820.0494 | 370.5828 | 0.938664 | 1 | | 8 | 532.6093 | 380.7485 | 797.8188 | 583.7634 | 0.954729 | 1 | | 9 | 523.6484 | 655.9752 | 801.9327 | 835.4104 | 0.991868 | 1 | | 10 | 516.6836 | 879.7378 | 798.6421 | 1052.4520 | 0.989354 | 1 | | 11 | 504.3114 | 1121.1510 | 797.4492 | 1299.8860 | 0.928651 | 1 | | 12 | 460.5099 | 1356.4590 | 787.1250 | 1564.1680 | 0.962921 | 1 |
|
查看原文
徐乐先, 陈西江, 班亚, 黄丹. 基于深度学习的车位智能检测方法[J]. 中国激光, 2019, 46(4): 0404013. Lexian Xu, Xijiang Chen, Ya Ban, Dan Huang. Method for Intelligent Detection of Parking Spaces Based on Deep Learning[J]. Chinese Journal of Lasers, 2019, 46(4): 0404013.



















 PDF全文
PDF全文

