一种特征感知的三维点云简化算法  下载: 1431次
下载: 1431次
Feature-Aware Three-Dimensional Point Cloud Simplification Algorithm
西北大学信息科学与技术学院, 陕西 西安 710127
图 & 表
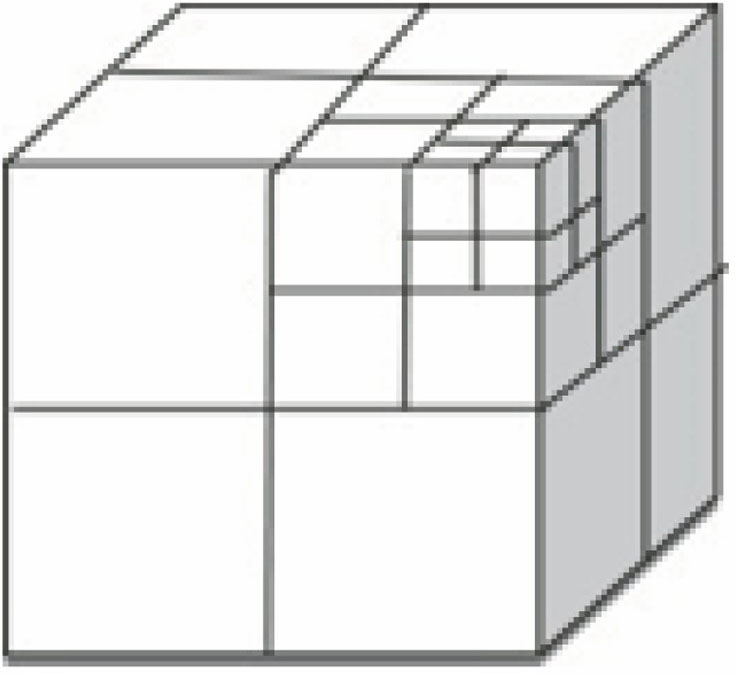
图 1. 八叉树的空间分割
Fig. 1. Space segmentation of octree
下载图片 查看原文
图 2. 八叉树结构
Fig. 2. Octree structure
下载图片 查看原文
图 3. 投影点附近点示意图
Fig. 3. Schematic of neighbor points near projection point
下载图片 查看原文
图 4. 原始点云
Fig. 4. Original point cloud
下载图片 查看原文
图 6. 曲率估计选择的特征点和非特征点。(a)原始点云;(b)曲率估计点云
Fig. 6. Feature points and non-feature points selected by curvature estimation. (a) Original point cloud; (b) curvature estimation point cloud
下载图片 查看原文
图 7. 有向Hausdorff距离
Fig. 7. Directed Hausdorff distance
下载图片 查看原文
图 8. 不同点云模型的简化效果。(a)斯坦福兔子;(b)椅子;(c)兵马俑
Fig. 8. Simplification effect of each point cloud model. (a) Bunny; (b) chair; (c) TW
下载图片 查看原文
图 9. 不同简化率下的重建效果。(a)斯坦福兔子;(b)椅子;(c)兵马俑
Fig. 9. Reconstruction effect at different simplification rates. (a) Bunny; (b) chair; (c) TW
下载图片 查看原文
表 1不同简化率下不同点云模型的简化速度
Table1. Simplification speed of each point cloud model at different simplification rates
| Point cloudmodel | Originalpoint cloud | Clusternumber | Simplification time /ms |
|---|
| η=80% | η=50% | η=20% |
|---|
| E | C | S | E | C | S | E | C | S | | Bunny | 35949 | | 125 | 1063 | 258 | 125 | 1063 | 493 | 125 | 1063 | 674 | | Chair | 49960 | 30 | 83 | 913 | 324 | 83 | 913 | 587 | 83 | 913 | 732 | | TW | 349863 | | 1076 | 10672 | 3124 | 1076 | 10672 | 5936 | 1076 | 10672 | 8784 | | Bunny | 35949 | | 125 | 1422 | 206 | 125 | 1422 | 411 | 125 | 1422 | 578 | | Chair | 49960 | 50 | 83 | 1385 | 289 | 83 | 1385 | 562 | 83 | 1385 | 694 | | TW | 349863 | | 1076 | 23625 | 2937 | 1076 | 23625 | 5464 | 1076 | 23625 | 8293 | | Bunny | 35949 | | 125 | 2065 | 197 | 125 | 2065 | 383 | 125 | 2065 | 502 | | Chair | 49960 | 70 | 83 | 1968 | 264 | 83 | 1968 | 551 | 83 | 1968 | 675 | | TW | 349863 | | 1076 | 36735 | 2754 | 1076 | 36735 | 5269 | 1076 | 36735 | 7931 |
|
查看原文
表 2同一模型下不同算法简化速度及误差对比
Table2. Comparison of simplification speed and error for different algorithms under same model
| Point cloudmodel | Simplificationratio /% | Simplifiedalgorithm | Simplifiedtime /ms | Maximumerror /(10-4 mm) | Averageerror /(10-4 mm) |
|---|
| | CAA | 5000 | 3163 | 1042 | | Bunny | 50 | CSM | <3500 | 2178 | 612 | | | Proposed | <3000 | 2086 | 473 |
|
查看原文
王成福, 耿国华, 胡佳贝, 张勇杰. 一种特征感知的三维点云简化算法[J]. 激光与光电子学进展, 2019, 56(11): 111004. Chengfu Wang, Guohua Geng, Jiabei Hu, Yongjie Zhang. Feature-Aware Three-Dimensional Point Cloud Simplification Algorithm[J]. Laser & Optoelectronics Progress, 2019, 56(11): 111004.











 PDF全文
PDF全文

