基于激光测距的激光扫描投影系统标定技术研究  下载: 1013次
下载: 1013次
Research on Calibration Technology of Laser Scanning Projection System Based on Laser Ranging
1 长春理工大学光电工程学院光电测控与光信息传输技术教育部重点实验室, 吉林 长春 130022
2 北京空间机电研究所, 北京 100094
图 & 表
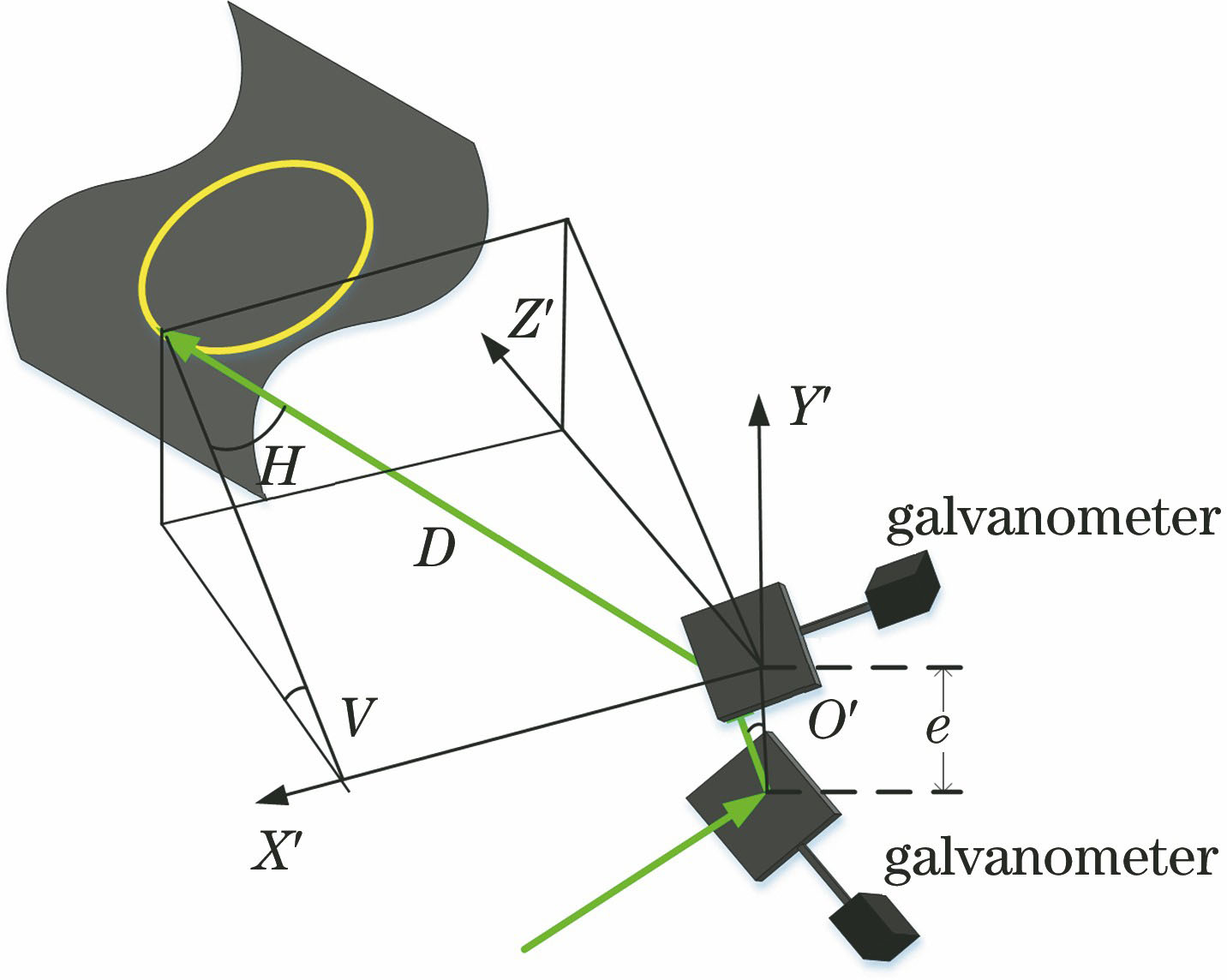
图 1. 激光扫描投影系统投影模型
Fig. 1. Laser scanning projection system projection model
下载图片 查看原文
图 2. 激光扫描投影系统标定示意图
Fig. 2. Calibration diagram of laser scanning projection system
下载图片 查看原文
图 3. 加入激光测距的标定模型图
Fig. 3. Calibration model with laser ranging
下载图片 查看原文
图 4. 未加激光测距模块下f较小时对应的c1、c2与w
Fig. 4. c1, c2 and w when f is small without laser ranging module
下载图片 查看原文
图 5. c1、c2与w对算法收敛概率的影响。(a) c1=c2=2.3, w=0.7;(b) c1=c2=2.1,w=0.5;(c) c1=c2=1.5, w=0.8;(d)c1=c2=1.1,w=0.8
Fig. 5. Effect of c1、c2 and w on the convergence probability of the algorithm. (a) c1=c2=2.3, w=0.7;(b) c1=c2=2.1, w=0.5; (c) c1=c2=1.5, w=0.8; (d) c1=c2=1.1, w=0.8
下载图片 查看原文
图 6. 加入激光测距模块后,f取最小值时对应的c1、c2与w
Fig. 6. c1, c2 and w when f is small with laser ranging module
下载图片 查看原文
图 7. 粒子群导数标定算法流程图
Fig. 7. Flow chart of particle swarm derivative calibration algorithm
下载图片 查看原文
图 8. 加入激光测距模块标定前后的定位误差
Fig. 8. Positioning error after calibration with and without laser ranging
下载图片 查看原文
表 10 粒子群导数标定算法在测距误差为±1 mm时的定位误差
Table1. 0 Positioning error with ±0.01 mm ranging errors in particle swarm derivative calibration algorithm
| Target points | dh /mm | dj /mm | dk /mm | Δl /mm |
|---|
| P1 | -1.11×10-7 | 3.55×10-7 | 1.75×10-7 | 4.11×10-7 | | P2 | 4.98×10-7 | 2.56×10-7 | 2.79×10-7 | 6.26×10-7 | | P3 | 2.99×10-7 | 2.51×10-7 | 1.96×10-7 | 4.36×10-7 | | P4 | 4.00×10-7 | 3.43×10-7 | 7.97×10-8 | 5.33×10-7 | | P5 | 2.90×10-7 | 2.44×10-7 | -1.63×10-8 | 3.79×10-7 | | P6 | 2.88×10-7 | 3.48×10-7 | 3.62×10-8 | 4.53×10-7 | | Average | | | | 4.73×10-7 |
|
查看原文
表 11 合作目标点空间位置信息
Table1. 1 Cooperation target point space location information
| Target points | m /mm | n /mm | q /mm | h /mm | j /mm | k /mm |
|---|
| P7 | 1008.79384 | 317.767798 | 0 | -1304.513 | -168.626003 | 3000 | | P8 | 603.821058 | 1255.47986 | 0 | -899.54018 | -1106.33807 | 3000 | | P9 | -255.13374 | 1675.98398 | 0 | -40.585376 | -1526.84218 | 3000 | | P10 | -1348.3362 | 1447.99194 | 0 | 1052.61713 | -1298.85014 | 3000 | | P11 | -1649.3914 | 300.591543 | 0 | 1353.67225 | -151.449748 | 3000 | | P12 | -1374.2905 | -796.40082 | 0 | 1078.57141 | 945.5426163 | 3000 | | P13 | -979.06597 | -1234.1214 | 0 | 683.346848 | 1383.263169 | 3000 | | P14 | -525.82694 | -1220.4179 | 0 | 230.107819 | 1369.559659 | 3000 | | P15 | -102.64258 | -1198.9637 | 0 | -193.07653 | 1348.105445 | 3000 | | P16 | 485.144189 | -1064.4965 | 0 | -780.86331 | 1213.638277 | 3000 |
|
查看原文
表 1合作目标点空间位置信息
Table1. Cooperation target point space location information
| Target points | P1 | P2 | P3 | P4 | P5 | P6 |
|---|
| H /(°) | 14 | 16 | 4 | -13 | -12 | -2 | | V /(°) | 10 | -10 | -12 | -15 | 9 | 14 | | m /mm | -1080.1748 | -1197.9003 | -517.17885 | 444.404719 | 371.154856 | -184.2575777 | | n /mm | -379.83915 | 678.122737 | 786.81148 | 952.989372 | -326.01153 | -598.8422135 | | q /mm | 0 | 0 | 0 | 0 | 0 | 0 | | h /mm | 784.455668 | 902.181225 | 221.459737 | -740.12384 | -666.87397 | -111.4615399 | | j /mm | 528.980942 | -528.98094 | -637.66969 | -803.84758 | 475.153321 | 747.9840085 | | k /mm | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 |
|
查看原文
表 2合作目标点在投影坐标系下的三维坐标及其定位误差
Table2. Three-dimensional coordinates of the cooperative target point in the projected coordinate system and its positioning error
| Target points | h /mm | j /mm | k /mm | dh /mm | dj /mm | dk /mm | Δl /mm |
|---|
| P1 | 784.4556679 | 528.9809417 | 3000 | 5.13×10-8 | -3.93×10-7 | 9.99×10-7 | 1.08×10-6 | | P2 | 902.1812254 | -528.980943 | 3000 | 2.38×10-7 | -5.39×10-7 | 1.72×10-6 | 1.82×10-6 | | P3 | 221.4597368 | -637.669685 | 3000 | -4.68×10-9 | -2.73×10-7 | 5.77×10-7 | 6.39×10-7 | | P4 | -740.123836 | -803.847577 | 3000 | 3.04×10-8 | 2.03×10-7 | -1.03×10-6 | 1.05×10-6 | | P5 | -666.873974 | 475.1533211 | 3000 | 4.30×10-7 | 7.39×10-8 | -1.52×10-6 | 1.58×10-6 | | P6 | -111.461539 | 747.9840085 | 3000 | 5.37×10-7 | -4.31×10-8 | -6.80×10-7 | 8.68×10-7 | | Average | | | | | | | 1.17×10-6 |
|
查看原文
表 3合作目标点空间位置信息
Table3. Cooperation target point space location information
| Target points | P1 | P2 | P3 | P4 | P5 | P6 |
|---|
| D /mm | 3242.59888 | 3273.07314 | 3174.75533 | 3290.155 | 3207.48666 | 3193.786456 |
|
查看原文
表 4加入激光测距模块后,合作目标点在投影坐标系下的三维坐标及其定位误差
Table4. Three-dimensional coordinates of the cooperative target point in the projected coordinate system and its positioning error after adding laser ranging module
| Target points | h /mm | j /mm | k /mm | dh /mm | dj /mm | dk /mm | Δl /mm |
|---|
| P1 | 784.4556674 | 528.9809421 | 3000 | -4.50×10-7 | 3.98×10-8 | 2.77×10-9 | 4.51×10-7 | | P2 | 902.1812254 | -528.980942 | 3000 | 1.52×10-7 | -5.99×10-8 | 2.88×10-9 | 1.64×10-7 | | P3 | 221.4597368 | -637.669685 | 3000 | -4.75×10-8 | -6.12×10-8 | 5.93×10-9 | 7.77×10-8 | | P4 | -740.123836 | -803.847577 | 3000 | 5.29×10-8 | 3.70×10-8 | 1.02×10-8 | 6.53×10-8 | | P5 | -666.873974 | 475.1533209 | 3000 | -4.96×10-8 | -6.29×10-8 | 9.16×10-9 | 8.06×10-8 | | P6 | -111.46154 | 747.9840085 | 3000 | -5.01×10-8 | 3.81×10-8 | 6.57×10-9 | 6.33×10-8 | | Average | | | | | | | 1.50×10-7 |
|
查看原文
表 5测距误差为±1 mm时的定位误差
Table5. Positioning error at ranging errors of ±1 mm
| Target points | dx /mm | dy /mm | dz /mm | Δl /mm |
|---|
| P1 | 0.302532329 | 0.038719773 | 0.955555972 | 1.00 | | P2 | 0.082859281 | 0.014298441 | 0.946261332 | 9.50×10-1 | | P3 | 0.062968435 | 0.155955736 | -0.975369379 | 9.90×10-1 | | P4 | 0.032251015 | 0.356061090 | -3.693866585 | 3.71 | | P5 | 0.296987721 | 0.340726794 | -3.085006079 | 3.12 | | P6 | 0.351374220 | 0.225133035 | -1.458688731 | 1.52 | | Average | | | | 1.88 |
|
查看原文
表 6测距误差为±0.1 mm时的定位误差
Table6. Positioning error at ranging errors of ±0.1 mm
| Target points | dx /mm | dy /mm | dz /mm | Δl /mm |
|---|
| P1 | -0.00669991 | -0.00317092 | -0.095557476 | 9.58×10-2 | | P2 | 0.001115951 | -0.00228424 | 0.094663798 | 9.47×10-2 | | P3 | 0.001951032 | -0.00734551 | -0.097572449 | 9.79×10-2 | | P4 | 0.003224518 | -0.01449479 | -0.367280938 | 3.68×10-1 | | P5 | -0.00623375 | -0.01396377 | -0.531349478 | 5.32×10-1 | | P6 | -0.00827656 | -0.00983606 | -0.401346895 | 4.02×10-1 | | Average | | | | 2.65×10-1 |
|
查看原文
表 7测距误差为±0.01 mm时的定位误差
Table7. Positioning error at ranging errors of ±0.01 mm
| Target points | dx /mm | dy /mm | dz /mm | Δl /mm |
|---|
| P1 | -0.00067234 | -0.00031625 | -0.009555564 | 9.58×10-3 | | P2 | 0.000115166 | -0.00022861 | 0.009466565 | 9.47×10-3 | | P3 | 0.000196132 | -0.00073525 | -0.009757588 | 9.79×10-3 | | P4 | 0.000320292 | -0.00145083 | -0.036729185 | 3.68×10-2 | | P5 | -0.00063122 | -0.00139655 | -0.053135878 | 5.32×10-2 | | P6 | -0.00083442 | -0.00098309 | -0.040135172 | 4.02×10-2 | | Average | | | | 2.65×10-2 |
|
查看原文
表 8粒子群导数标定算法在测距误差为±1 mm时的定位误差
Table8. Positioning error with ±1 mm ranging errors in particle swarm derivative calibration algorithm
| Target points | dh /mm | dj /mm | dk /mm | Δl /mm |
|---|
| P1 | -8.89×10-8 | 2.93×10-7 | 2.60×10-7 | 4.02×10-7 | | P2 | 4.59×10-7 | 1.88×10-7 | -1.63×10-8 | 4.96×10-7 | | P3 | 2.54×10-7 | 2.21×10-7 | -1.06×10-7 | 3.53×10-7 | | P4 | 3.46×10-7 | 3.68×10-7 | -2.37×10-7 | 5.58×10-7 | | P5 | 3.08×10-7 | 2.65×10-7 | 1.16×10-7 | 4.23×10-7 | | P6 | 3.22×10-7 | 3.37×10-7 | 2.39×10-7 | 5.24×10-7 | | Average | | | | 4.59×10-7 |
|
查看原文
表 9粒子群导数标定算法在测距误差为±0.1 mm时的定位误差
Table9. Positioning error with ±0.1 mm ranging errors in particle swarm derivative calibration algorithm
| Target points | dh /mm | dj /mm | dk /mm | Δl /mm |
|---|
| P1 | -1.01×10-7 | 3.29×10-7 | 3.64×10-7 | 5.01×10-7 | | P2 | 4.81×10-7 | 2.27×10-7 | 3.80×10-7 | 6.54×10-7 | | P3 | 2.79×10-7 | 2.38×10-7 | 1.91×10-7 | 4.14×10-7 | | P4 | 3.77×10-7 | 3.54×10-7 | -7.61×10-8 | 5.22×10-7 | | P5 | 2.98×10-7 | 2.53×10-7 | -3.62×10-8 | 3.92×10-7 | | P6 | 3.02×10-7 | 3.43×10-7 | 1.21×10-7 | 4.73×10-7 | | Average | | | | 4.93×10-7 |
|
查看原文
侯茂盛, 刘继强, 刘大礼, 陈雨情, 张旭, 范成博. 基于激光测距的激光扫描投影系统标定技术研究[J]. 中国激光, 2019, 46(10): 1004002. Maosheng Hou, Jiqiang Liu, Dali Liu, Yuqing Chen, Xu Zhang, Chengbo Fan. Research on Calibration Technology of Laser Scanning Projection System Based on Laser Ranging[J]. Chinese Journal of Lasers, 2019, 46(10): 1004002.











 PDF全文
PDF全文

