






中国舰船研究
2025, 20(2): 3


深度学习在旋转机械故障诊断领域展示出显著潜力,但因工程实践中训练样本难以获取,导致基于深度学习的故障诊断方法存在泛化性弱、诊断精度低等问题。小样本故障诊断方法,凭借在有限数据条件下故障信息有效挖掘的能力,逐渐成为学术界和工程界研究的热点。
通过回顾并总结小样本学习方法在旋转机械故障诊断中的最新研究成果,阐述小样本故障诊断的任务定义和主要学习方法。在此基础上,根据不同的技术原理,将现有小样本故障诊断方法归纳为元学习、迁移学习、领域泛化、数据增强和自监督学习5类,并分析各类方法原理、应用及优缺点。
各类方法在小样本故障诊断领域已取得一定成效,但在实际应用中仍存在诸多局限性,如元学习计算资源需求大、迁移学习受域间相似性限制等。
未来在小样本故障诊断领域应探索数据治理、多模态学习、联邦学习以及机理−数据混合驱动等方法,克服现有方法的局限性,进一步提升小样本故障诊断的可靠性。
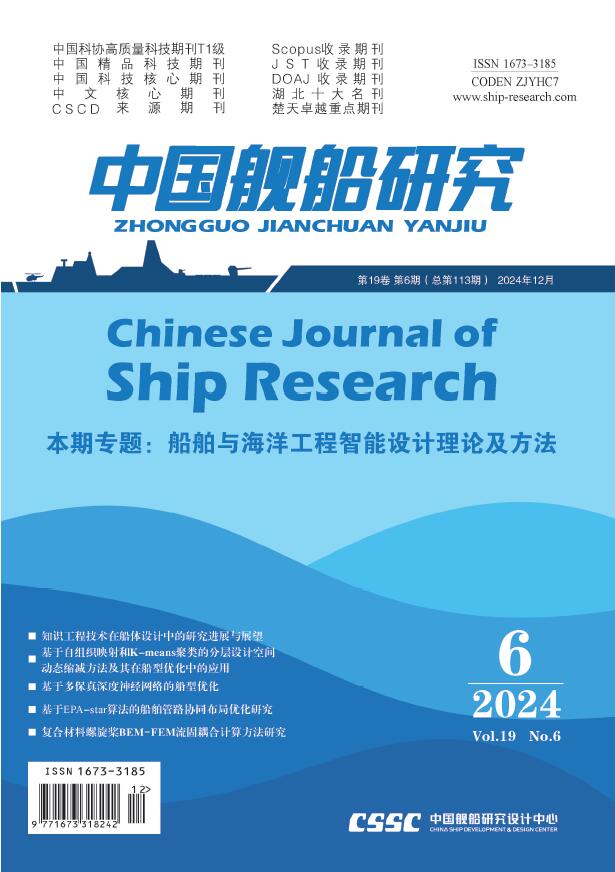
针对船舶航行中机舱背景噪声导致故障诊断方法在实际使用时精度差的问题,提出一种基于自适应噪声的完备经验模态分解(CEEMDAN)和贝叶斯残差高效通道注意力网络(BRECAN)的船舶电机故障诊断方法。
首先,通过CEEMDAN将含噪声电机故障信号分解为多个本征模态函数(IMF)分量,并基于去趋势波动分析(DFA)划分IMF中噪声和信息的主导信号,对于噪声主导信号使用经验小波变化(EWT)予以降噪;然后,构建BRECAN网络,基于变分贝叶斯理论,使用网络参数代替传统网络点估计的训练方式,使用参数建模,拟合噪声对模型训练的干扰,并通过残差高效通道注意力(RECA)模块引导网络提取故障差异特征;最后,通过电机故障模拟实验台,验证所提方法的有效性。
结果表明,所提方法在强噪声下能够实现船舶电机故障的精确诊断,在信噪比为−12 dB的条件下仍能保持90%以上的诊断精度。
研究成果可为强噪声下船舶电机故障诊断提供参考。

针对旋转机械在实际工作中因噪声干扰而导致的故障诊断性能下降问题,为提高振动信号的故障特征提取质量和故障诊断能力,提出基于Mel-frequency倒谱系数(MFCC)的并行双通道卷积神经网络(PDCNN)故障诊断方法。
利用MFCC提取含噪声的振动信号特征,同时设计一种新型并行双通道卷积神经网络结构,并利用该网络进一步挖掘数据的全局特征及更深层次的微小特征,从而提高该方法在强噪声环境下的诊断性能。
不同噪声环境下的实验评估结果表明,该方法在强噪声环境下的故障诊断精度高于98%,其抗噪性能和诊断性能均明显优于其他传统方法。
研究成果可为强噪声环境下的齿轮箱故障诊断提供参考。

针对传统神经网络在强噪声干扰下特征提取能力不足的问题,提出一种新的全局注意力残差收缩网络,实现复杂环境下柱塞泵故障精准诊断。
首先,对原始监测信号进行数据切分;建立一种新的带有注意力机制的全局特征提取器,从监测信号中提取故障相关特征,同时引入阈值软化机制,减少信号中噪声干扰的影响;然后,对网络模型进行反向传播优化,减少损失误差,提升模型的诊断性能;最后,将特征提取结果输入到故障分类器进行故障识别。基于柱塞泵故障模拟实验台,验证所提出方法的有效性。
结果表明:相比其他模型,该全局注意力残差收缩网络模型有更高的诊断精度,且具备更强的抗干扰能力。
该诊断方法能够在复杂恶劣环境下实现故障的精准诊断。

船用消防泵电机的轴承工作环境较复杂,其故障诊断的准确度较低,为此提出一种基于自适应稳态子空间分析(SSA)与改进Teager能量算子(TEO)的船用消防泵电机轴承故障特征增强与诊断方法。
首先,对传统SSA方法进行优化,采用虚假最近邻点确定Hankel矩阵维数,并基于峭度指标提取振动信号中经SSA分解后的包含最佳故障特征的非稳态信号;然后,通过改进TEO算法,有效提升故障特征在振动信号中的占比,从而增强故障特征并实现准确诊断;最后,通过仿真实验和工程实验进行有效性验证。
对比结果表明,该方法可准确地判断轴承的故障特征频率及其倍频,从而有效诊断轴承故障。
研究成果可为船用泵组电机轴承的故障诊断提供参考。

针对船舶水泵轴承故障时的振动信号故障特征易被噪声淹没,导致诊断准确率较低的问题,提出一种基于巴特沃斯均值滤波器和马尔可夫转移场(BM-MTF)与ResNet-18网络相结合的轴承故障特征增强与诊断方法。
首先,引入BM滤波器,以强化信号的故障冲击波形,从而抑制噪声干扰、增强故障特征;然后,通过MTF绘制二维图像,以有效可视化并增强信号特征,再将经BM信号滤波后的MTF图像输入ResNet-18网络进行诊断识别;最后,采用西储大学轴承故障公开数据集、实验室轴承故障数据集和船舶水泵轴承故障数据集进行对比验证。
实验对比结果表明,所提BM-MTF方法可以有效提取轴承故障特征,其对3种轴承故障数据集的诊断准确度均达到100%,显著提升了轴承故障准确度。
研究成果可为船舶水泵轴承故障诊断提供参考。

针对监测信号在单一分析域内的特征参数难以完整表征监测对象的运行状态,以及极限学习机(ELM)网络的模型参数难以达到最优的问题,提出一种基于多域信息融合与改进ELM的船舶电机轴承故障诊断方法。
首先,基于船舶电机轴承振动信号在时域、频域与时频域内的特征信息,构建多域特征参数集,作为故障诊断模型的输入;然后,运用麻雀搜索算法改进ELM网络的模型参数优化方法,确定最优的权值与阈值,进而提高故障诊断ELM模型的识别精度。最后,通过船用电机试验台架实验数据和开源实验数据,对电机轴承故障状态进行识别。
基于船用电机试验台架的实验数据验证表明,采用多域特征参数集的故障诊断模型在训练集和测试集上的识别精度均为100%;基于开源实验数据验证表明,改进ELM模型的测试集识别精度为90.5%,相较于原始ELM模型提高了12.7%,且训练集识别精度与测试集识别精度均高于其他诊断模型。
所提方法在输入特征参数集与诊断模型上均有改进,可有效识别电机轴承故障状态,且模型具有良好的稳定性,为船舶电机轴承故障诊断提供参考。
船舶柴发配电系统对航行稳定性至关重要,海洋工作环境的严苛性致使其故障频发,为此提出一种基于鲸鱼优化算法的优化随机森林(WOA-RF)算法,用以开展船舶柴发配电系统故障诊断。
首先,基于Matlab/Simulink仿真软件搭建船舶柴发配电系统模型,采集其故障工况和正常工况的数据;然后,对收集的数据进行预处理以提取时域特征,并使用随机森林算法提取重要特征,从而减少数据维度;最后,使用WOA优化后的随机森林模型对船舶柴发配电系统运行数据进行故障识别、诊断和分类。
仿真模拟试验表明:采用WOA-RF算法识别故障状态和正常状态的准确率为100%,区分12种故障类型的诊断准确率为98.26%;在原始数据集中,与9种不同算法对比,WOA-RF算法的准确率最低提升了4.86%,最高提升了34.37%;在添加10 dB噪声数据后,与6种不同算法对比,WOA-RF算法的准确率最低提升了2.43%,最高提升了18.40%。
基于WOA-RF算法的故障诊断方法在复杂海洋环境下展示了优异的准确性和鲁棒性,结果可为船舶电力系统故障的可靠识别提供参考。
对于由多个分布式电源构成的岛礁电力系统,为了提高其故障定位的快速性和准确性,提出一种基于免疫模型与改进免疫算法的岛礁电力系统故障定位方法。
首先,利用免疫模型将岛礁供电系统区段划分为包含监测点的若干个小区段,根据监测的故障电流信号来确定故障点所在的小区段,从而最大限度地缩小故障判定范围;然后,针对该小区段故障点进行编码,并借助改进免疫算法生成抗体种群,进而对故障区段快速地进行二次精确定位,同时大幅降低计算量。
根据典型岛礁供电系统的Matlab仿真验证结果,免疫模型与改进免疫相结合的算法可以实现岛礁电力系统在不同故障工况下的快速故障定位,具有定位精度高、计算量小、求解速度快等优势。
研究成果可为岛礁电力系统设计提供参考。
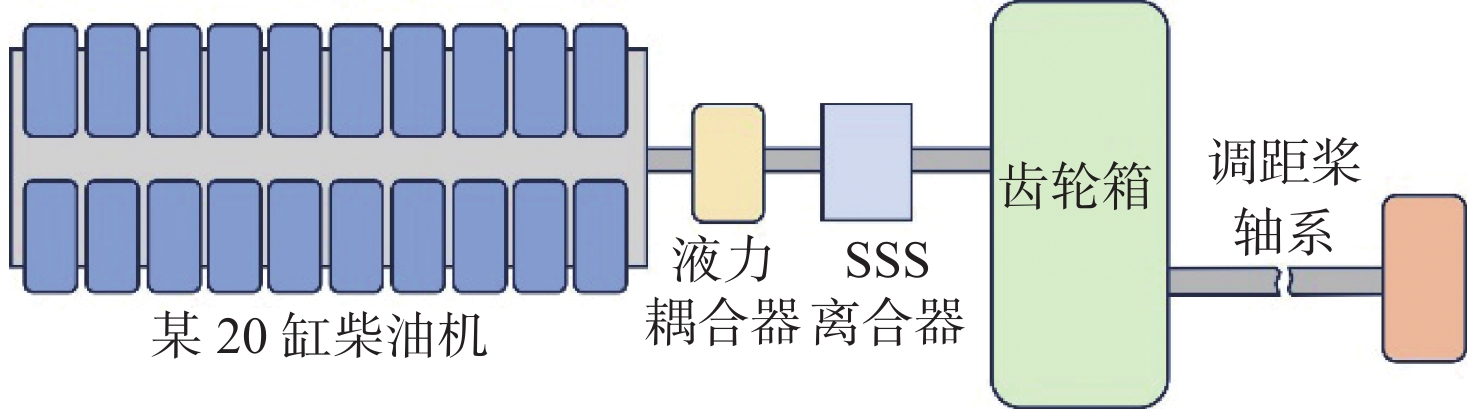
面向舰船智能机舱的发展需求,提出一种基于长短期记忆(LSTM)神经网络预测与云重心评判的舰船柴油机健康状态评估方法,以提升舰船柴油机运维能力。
该方法首先基于LSTM预测参数与实测参数的偏差,构建评估指标参数集。然后,采用层次分析法确定各参数的权重,并使用云重心评判法对柴油机健康状态进行评估。最后,采用实际舰船柴油机前期正常数据和后期退化数据进行测试。
测试结果表明,柴油机在前期正常运行状态下的评价值为99.94,对应健康状态,而在后期退化状态下的评价值为81.71,对应良好状态。这表明该方法能够有效实现柴油机健康状态的评估。
所提方法可用于舰船柴油机和其他动力设备健康状态评估,具有实际应用价值。
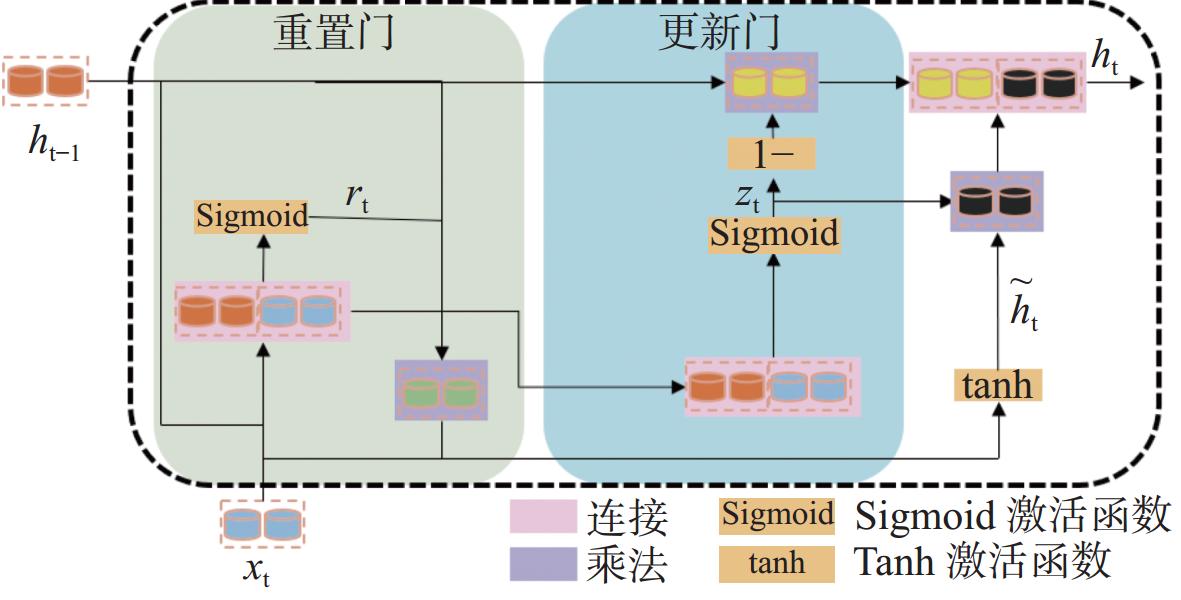
为实现船舶机械设备中轴承的剩余寿命预测,提出基于双向门控循环单元(BiGRU)、变分自编码器(VAE)和多门控专家混合层(MMoE)的多任务门控网络预测模型。
首先,计算轴承信号时域特征以表征监测数据中的基本退化趋势;然后,建立轴承健康状态(HS)评估和剩余使用寿命(RUL)预测子任务构成多任务门控网络预测模型,子任务中使用BiGRU和VAE提取时域特征趋势信号中的退化信息,再利用MMoE自适应分离子任务的差异特征。最后,在XJTU-SY轴承数据集上进行有效性验证。
结果表明,与长短期记忆网络(LSTM)等经典时序数据预测模型相比,多任务门控网络预测模型的预测精度更高,误差指标MAE和RMSE分别提升62.5%和67.81%。
所提方法可以实现轴承剩余寿命的预测,对船舶机械设备健康管理与智能运维具有一定的参考价值。
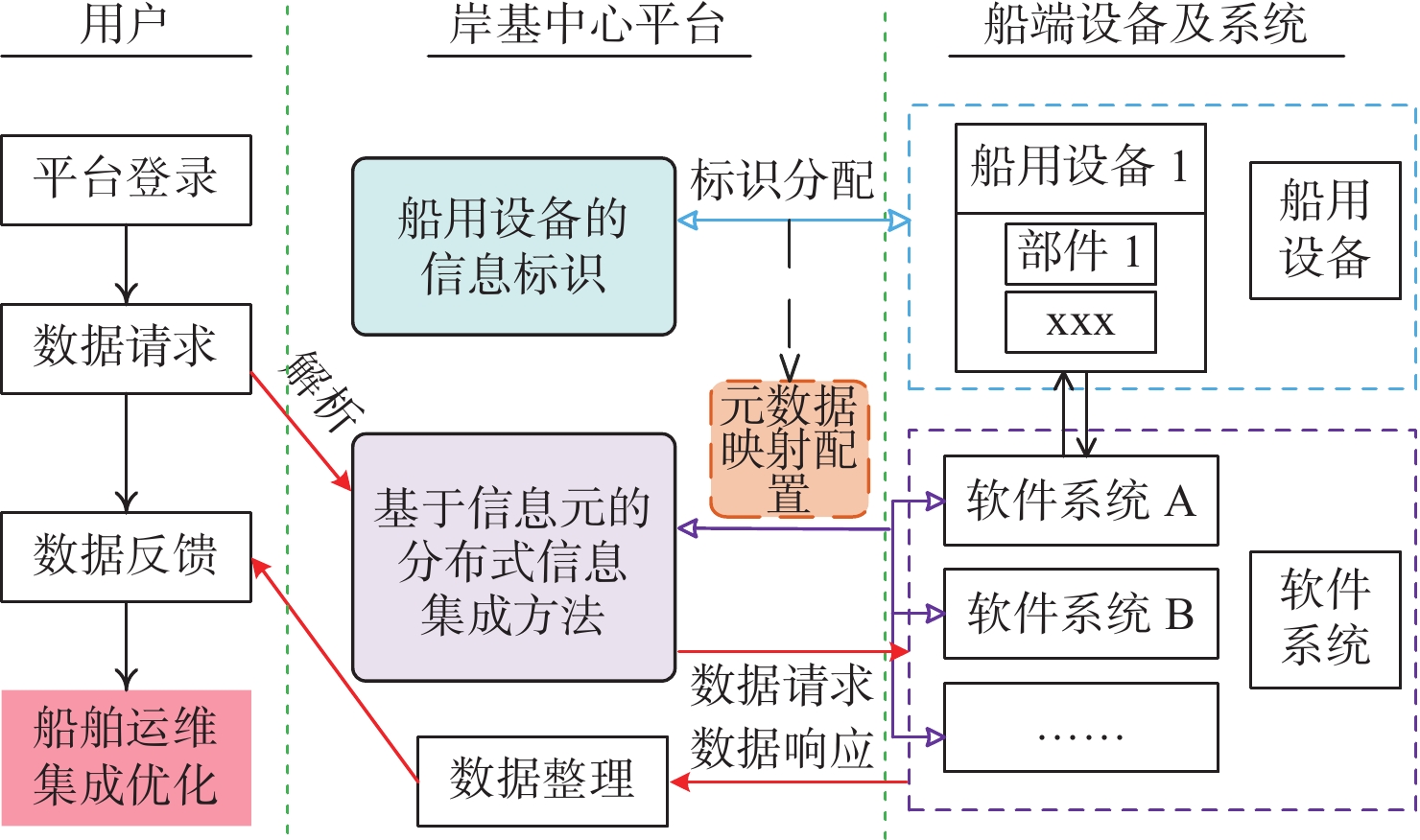
在船用欠稳定网络环境下,为提高数据传输效率和减少通信费用,提出一种基于“请求−响应”模式的分布式信息集成模式。
结合信息元的有效组织和管理,通过详细定义信息元的组织方法,实现元数据的高效获取和平台元数据库的创建。此外,研究还涉及信息标识解析、元数据映射配置及SQL语句的动态解析编译器设计,有效处理语义异构问题,并实现不同软件系统间数据的集成。
实验结果显示,与传统模式相比,基于“请求−响应”模式的数据集成方法显著降低了24 h通信量。在单项数据集成实验中,24 h通信量从原有模式的
证明了基于“请求−响应”模式的分布式信息集成方法在船用欠稳定网络环境下的高效性和实用性。
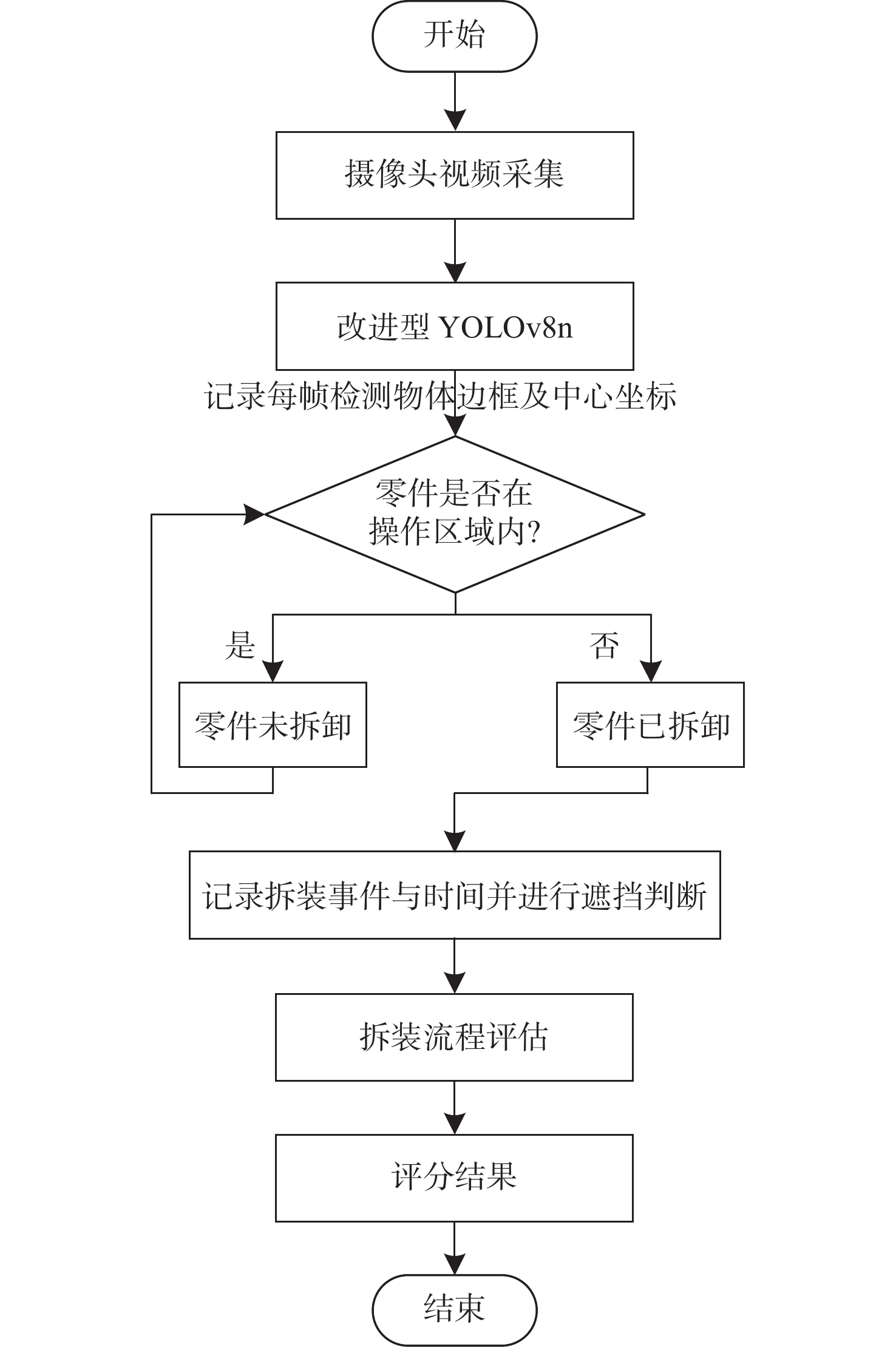
船舶机舱作业规范性是船舶安全管控的关键部分,因此船员实操考试将船舶设备拆装作为一个重要考核项。为提升船员实操考试的电子化和智能化水平,提出一种基于计算机视觉的船舶设备拆装流程规范性的自动化识别方法。
首先,以YOLOv8n构建船舶设备检测模型的骨干网络,并引入高效通道注意力机制(SA),以提高模型特征提取能力与训练效率;然后,在颈部网络中引入重参数化泛化特征的金字塔网络(GFPN)融合结构,以提高模型的多尺度特征融合能力;最后,引入动态非单调聚焦机制损失函数(WIoU)来替换原CIoU损失函数,以提高模型精度。
自建数据集的试验结果表明:与YOLOv8n相比,改进目标识别算法的平均精度均值提高了0.15,实时检测的每秒帧数提升了0.6,可以准确识别齿轮泵的拆装流程。
该改进算法具有更强的识别能力,可以更好地应用于船舶设备拆装流程规范性的识别任务。
内孤立波广泛存在于密度层化的海洋中,是一种常见的非线性、大振幅的波动现象。在其传播过程中会诱导波面上下的海水流动呈现剪切状态,并引起海水强烈的幅聚幅散和突发性的强流。当运动潜体在水下作业时极有可能会遭遇内孤立波,内孤立波峰高谷深、能量集中,严重影响到潜体的运动稳定性和水动力载荷特性,进而导致潜体运动失稳、操纵失控等。首先,基于海洋内孤立波与潜体相互作用这一工程背景,从理论研究、观测与试验研究及数值模拟研究3个研究方向总结当前国内外关于内孤立波特性的研究;然后,分别对内孤立波与结构物相互作用、内孤立波与潜体相互作用的研究予以总结;最后,基于现阶段国内外关于内孤立波的研究现状,进一步提出内孤立波研究的工作展望。

“定位艏型”自航绞吸挖泥船的水动力性能与普通船型相比存在较大差异,为合理选择和设计自航绞吸挖泥船的船尾型线,进行水动力性能分析。
采用计算流体力学(CFD)方法开展船模阻力试验数值验证,并在此基础上对比分析双呆木艉和双尾鳍艉这2种船尾型线的静水阻力性能、艉部流场、轴向伴流分数及不均匀度等水动力性能。
结果显示,在各航速下,双尾鳍艉的总阻力系数小于双呆木艉;在设计航速点,双尾鳍艉的总阻力系数较双呆木艉小8.6%,而双呆木艉的伴流目标函数(WOF)较双尾鳍艉小11.0%,轴向伴流场更均匀。
研究结果可为同类船型的型线设计和优化提供参考价值。

为保障科考人员安全和科考设备性能,需开展极端海况下的科考船砰击载荷和液体飞溅特性研究。
以“中山大学”号科考船为例,基于光滑粒子流体动力学(SPH)方法,建立δ-SPH流固耦合动力学模型,进行极端海况下的SPH数值模拟,从而预测船体受到的砰击载荷、甲板上浪及液体飞溅程度,并分析其影响因素和物理机制。
仿真结果表明:波高越大、波长越接近船长时,船体受到的砰击载荷越大,甲板上浪和液体飞溅越明显。
研究成果可为极端海况下操纵与控制科考船、保障科考人员安全及科考设备性能提供参考。
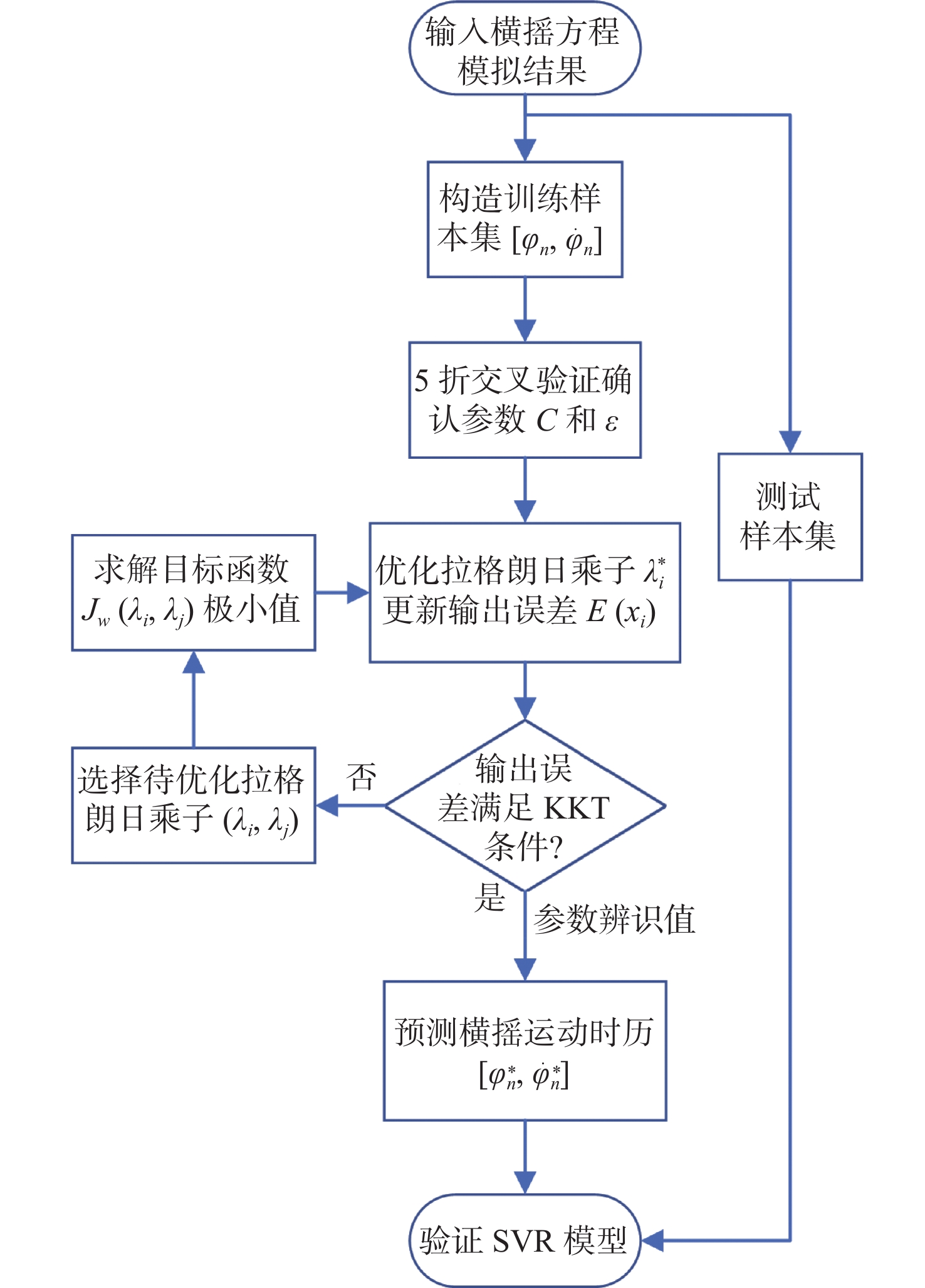
针对三体船横摇的非线性,提出CFD与支持向量回归(SVR)相结合的船体运动辨识建模方法,
基于STAR-CCM+平台,对不同侧体横向位置三体船的强迫横摇运动进行数值模拟,并应用SVR方法对力矩时历曲线进行参数辨识,计算不同频率下船体的附加质量与阻尼系数。
结果表明,三体船阻尼系数呈现出较强的频率相关性;低频时阻尼非线性特征明显,舭龙骨阻尼成分占比较大。
所提方法能够准确捕捉三体船横摇运动的非线性特征,相比于势流理论能够更好地考虑片体间流场的相互作用。
针对瘫船稳性和参数横摇两种稳性失效模式,通过对船舶横摇运动响应极值进行预报,对船舶在波浪中的稳性和安全性进行评估。
分别建立瘫船状态和参数横摇状态下船舶横摇运动方程,结合线性滤波器技术,采用龙格库塔法计算得到随机海浪下船舶横摇运动响应时历。将船舶横摇运动响应的绝对值定义为随机过程X(t),运用平均条件超越率(ACER)法对X(t)的时历数据进行分析,对其极值分布进行预报。
研究表明,ACER法能够有效地预报瘫船状态和参数横摇状态下船舶横摇运动响应的极值分布,随机过程X(t)在临界水平处(如浸水角)的超越概率可作为评估船舶倾覆的重要指标。
采用ACER方法预报船舶横摇运动响应极值,能够为波浪中的船舶稳性评估提供重要参考。
针对两栖飞机入水冲击振动噪声分析需求,研究前飞速度和入水角度对两栖飞机入水冲击振动噪声的影响规律。
首先,基于任意拉格朗日−欧拉(ALE)算法,建立两栖飞机有限元模型,开展两栖飞机入水冲击运动特性分析,探究不同前飞速度和入水角度下两栖飞机入水冲击阶段运动特性规律;然后,基于统计能量分析(SEA)方法,建立两栖飞机SEA模型,开展两栖飞机入水冲击振动噪声特性数值仿真,探究前飞速度和入水角度对两栖飞机入水冲击振动噪声的影响规律。
结果表明,前飞速度越小,两栖飞机受到水动力冲击响应越小,横荡程度越小,纵向速度下降也随之越慢,且两栖飞机驾驶室内噪声呈全频段降低的趋势;入水角度对驾驶室内噪声影响不大,相比而言,入水角度为4°时两栖飞机受到的水动力冲击影响最大,但横向稳定性最好。
通过控制适当的前飞速度和入水角度可兼顾入水姿态及舱室噪声控制。
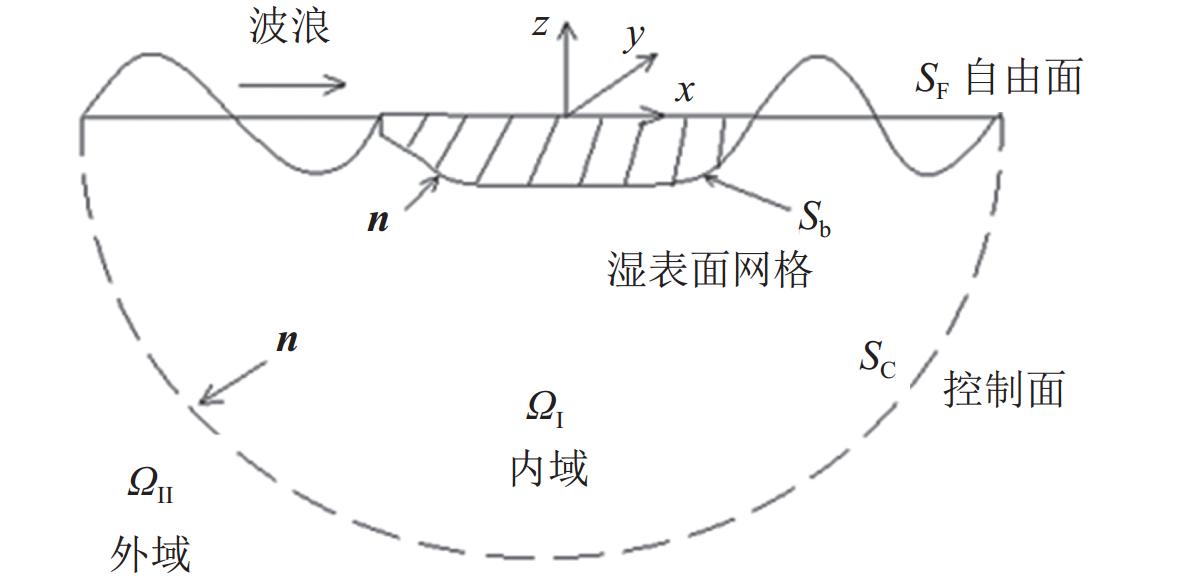
旨在研究波高对船舶非线性波浪载荷的影响。
以一艘20 000 TEU集装箱船为研究对象,首先,对其在不同波高下的波浪载荷进行数值研究。基于刚体理论,采用三维边界元和内外场匹配法计算流体场速度势和波浪激振力,并对自由面的范围和网格划分进行收敛性分析。进一步地,分别考虑湿表面引起的波浪激励力与静水恢复力这2种非线性因素,采用三维非线性时域方法研究不同波高的非线性因素对船舶运动和波浪载荷的影响。
结果显示,船体剖面波浪外载荷的非线性现象比船体运动更为显著,且随着波高的增加,船舶的倍频响应也增大。
船舶非线性波浪载荷的倍频现象由船体湿表面变化引起的非线性波浪激励力和静水恢复力共同作用所致,其对波浪载荷量值和循环次数以及结构疲劳损伤的影响较大。因此,在实际工程设计阶段,需充分考虑船体载荷的倍频响应成分,以提高船舶安全性设计水平。
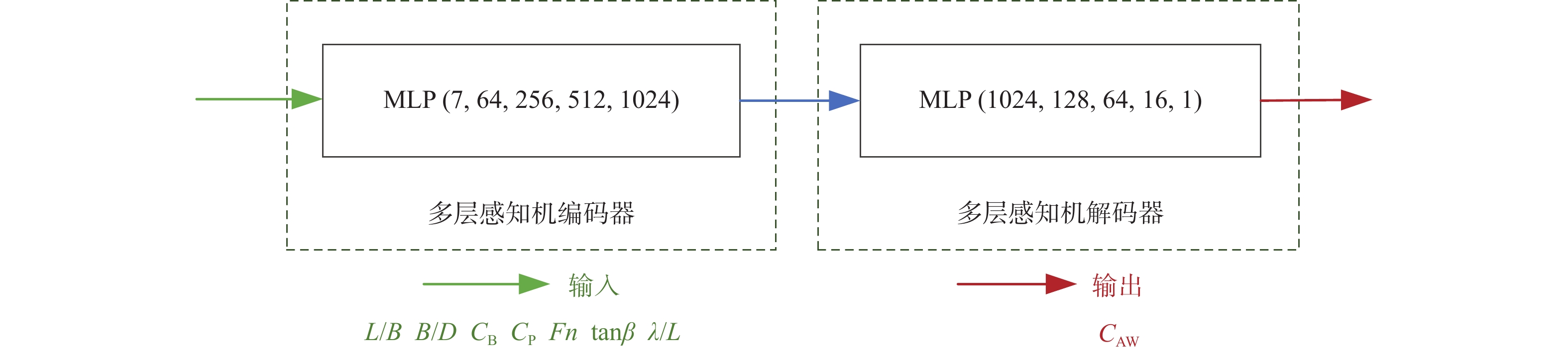
为在设计阶段快速预报船舶波浪增阻,提出一种基于点云特征提取的神经网络模型——波浪增阻点云预报模型。
以S60船为例,与传统的基于主要设计参数的模型预报进行对比;参照船模试验结果,分析点云预报模型在准确性和稳定性等方面的优势,探讨利用静水阻力预训练优化模型的方法。
结果显示,基于点云特征提取的波浪增阻预报模型在全部5艘S60母型船上的预报结果的决定系数R2 = 0.74~0.90,而基于主要设计参数的模型会在部分船型中失效。
所做研究可为船舶波浪增阻预报提供新的思路和方法,有利于在设计阶段充分考虑波浪增阻的影响从而有利于设计和优化船型。

铰接多浮体结构不仅受到波浪激励力的作用,还会受到连接力、系泊力、浮体间的绕射力等非线性载荷的共同作用,准确预测浮体的运动特性十分重要。
基于水动力分析软件AQWA,建立系泊及铰接连接状态下的多浮体运动数值模型,并通过系泊单浮箱试验的对比研究,验证数值模型的可靠性,探索波浪载荷下双浮箱系统的运动响应特性和系泊张力特性,总结并分析铰接多浮体系统的运动规律。
研究表明,连接件长度过小时,双浮箱之间的水动力干扰剧烈,浮箱纵摇运动、横摇运动均随着连接件刚度的增加而逐渐降低,且系泊张力的变化规律与浮箱运动响应相反。
系泊及铰接多浮体结构运动规律的发现可为海洋环境下多浮体结构的连接件设计提供参考。
为评估舰船毁伤生命力并支撑战场快速决策,进行复杂海况下损伤结构剩余承载能力分析。
针对舱内爆炸损伤后的船体薄板,通过模型试验,分析双轴压缩下含凹陷损伤薄板的剩余承载能力。通过不同载荷比例加载,分析凹陷损伤薄板在组合载荷作用下的力学特性。基于数字图像相关法(DIC),建立三维全场应变测量系统,详细记录薄板的面外变形过程,揭示双轴压缩下含凹陷损伤薄板的破坏失效模式。
结果显示,在任意加载比例下,凹陷损伤的存在都会显著降低薄板的剩余承载能力,最大可达19.96%,所有板均是因加载边夹角处的塑性大变形而破坏失效;随着双向轴压一端载荷的增加,另一端的极限承载能力会显著下降。
所做研究对复杂应力下舰船毁伤生命力评估和安全返港具有重要指导意义。

为准确评估船体梁的极限强度,考虑循环载荷下船体加筋板的弹性安定特性。
基于非线性有限元数值模拟结果,对Rahman梁−柱法中加筋板单元的平均应力−平均应变关系进行修正,并充分考虑弹性安定状态、加筋板类型和失效模式,提出一种适用于弹性安定临界状态下加筋板平均应力−平均应变关系的修正方法,编制基于弹性安定临界状态的船体梁极限强度Smith法程序,并与非线性有限元数值模拟结果进行对比。
结果显示,所提方法能够有效评估弹性安定临界状态下船体梁的极限强度,且相比非线性有限元方法更具计算优势。
基于弹性安定临界状态的船体梁极限强度Smith法有助于船体梁极限强度准确且高效的评估。

在冰−螺旋桨切削或碰撞试验中,采用满足几何相似和冰力学特性相似准则的模型冰对螺旋桨冰载荷的测试结果而言至关重要。
以淡水冰、盐水冰、尿素冰、混合乙二醇/脂肪族洗涤剂/糖(EG/AD/S)冰以及石蜡模型冰作为研究对象,开展不同材质模型冰的单轴压缩试验,对比测试分析不同应变速率以及冷冻和回温状态下冰试样的压缩强度和破坏模式。
采用冷冻温度为−20 ℃,冷冻时间为48 h,回温温度为−5 ℃,回温时间为24 h所制作的盐水冰可以满足冰−桨的接触试验要求;模型冰的压缩强度从大到小依次为尿素冰、淡水冰、EG/AD/S冰、石蜡模型冰、淡水冰−回温、EG/AD/S冰−回温、盐水冰、尿素冰−回温以及盐水冰−回温。
试验测试结果可为后续冰−螺旋桨切削或碰撞试验中模型冰的选择提供参考。

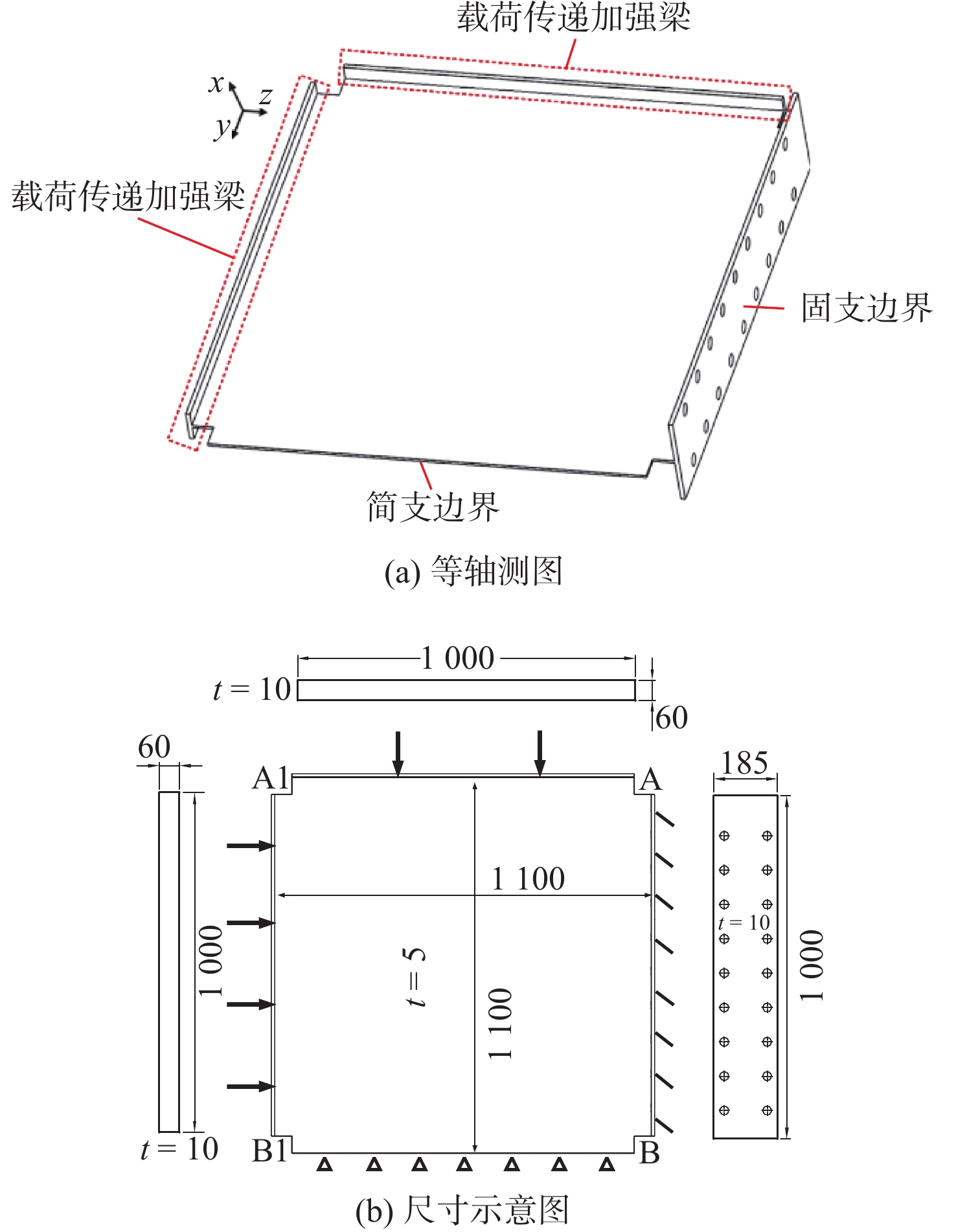
旨在研究侧压载荷对联合载荷作用下加筋板极限强度与失效机理的影响。
基于非线性有限元方法建立数值模型,采用ABAQUS软件进行面内轴压与面外侧压载荷联合作用下的数值仿真分析,提取各工况下的加筋板面外位移场,并对其进行屈曲模态分解。在获得不同模型的模态幅值−轴向载荷曲线的基础上,量化加筋板的变形过程,结合应力云图分析加筋板在侧压不同工况下的变形行为与失效模式。
结果显示,在联合载荷工况下,侧压载荷使加强筋在极限状态前发生端部屈服,导致整体屈曲模态幅值增加;随着侧压载荷的增加,加筋板整体屈曲成为联合载荷工况下的主导失效模式。
所做研究揭示了加筋板变形失效过程中局部、整体屈曲模态幅值与失效模式的联系,可为船体板架结构设计提供参考。
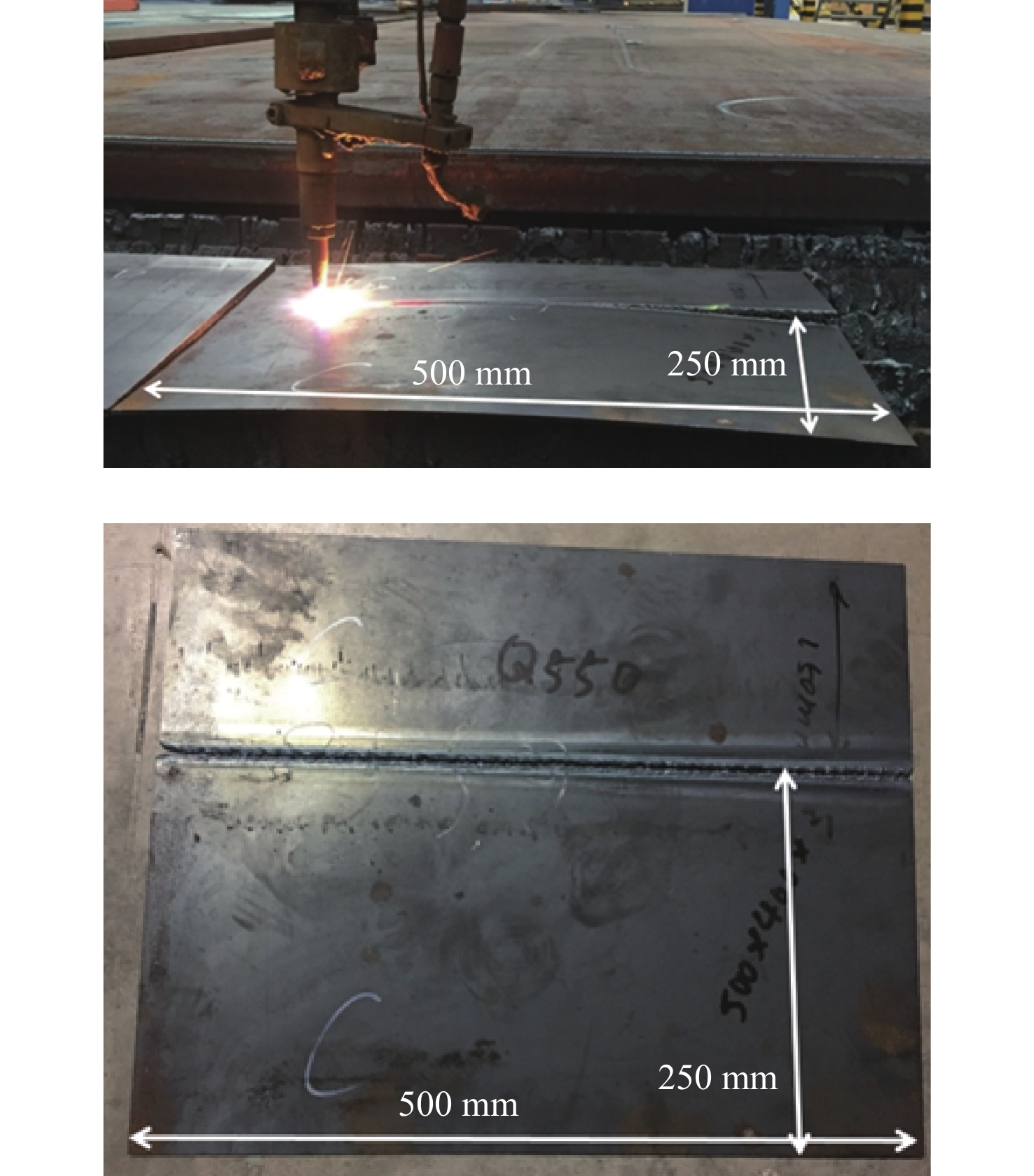
为有效控制高强钢薄板的火焰切割精度,研究切割面外失稳变形及面内弯曲变形的产生机理,提出动态辅助加热减小火焰切割变形的工艺方法。
以3 mm厚的Q550板材为研究对象,通过火焰切割试验和三坐标测量等方法,观测到高强钢薄板切割件的面外失稳变形和面内弯曲变形;应用大变形理论的热−弹−塑性有限元计算,分析高强钢薄板切割的热力学响应,以及辅助加热对高强钢薄板切割变形的影响。
预测的切割变形趋势和数值,都与实际测量结果高度吻合;在远离割缝区域辅助加热,切割面外失稳变形可降低90%,且面内弯曲变形降低40%以上。
基于切割变形产生的力学机理,可采用不同的辅助加热工艺,提高薄板火焰切割的精度;同时,应用高通量的热−弹−塑性有限元计算,可以得到减小火焰切割变形的优化工艺,指导高强钢薄板的高精度建造。
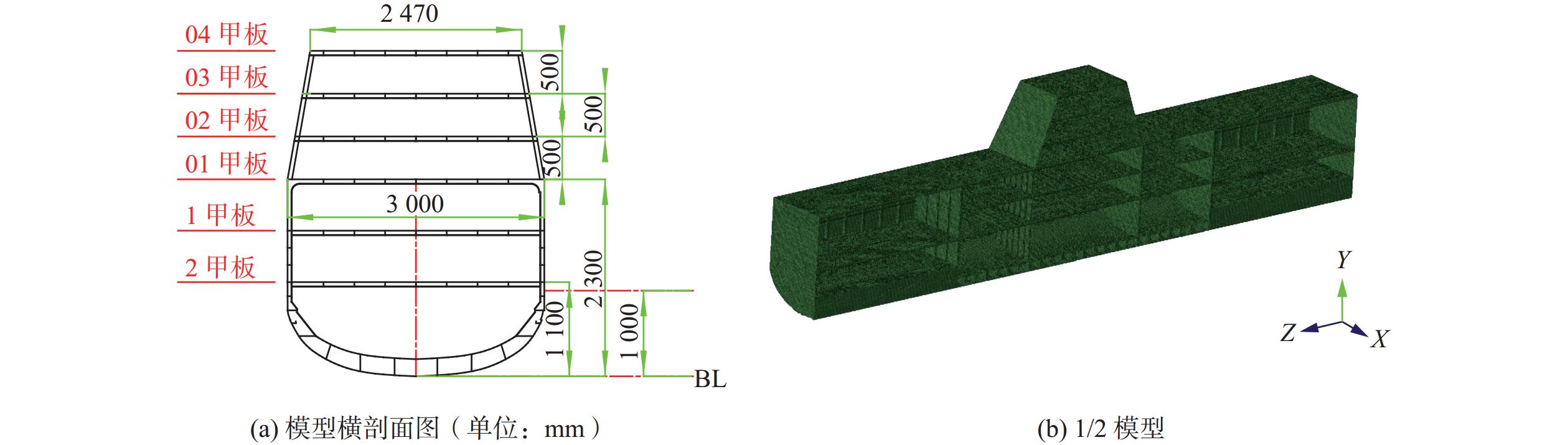
旨在揭示近场爆炸下破损舱室内部载荷特性。
以大尺度舱段模型水下近场爆炸试验为基础,针对试验后由模型外板形成的高速破片群载荷、由爆轰产物引起的准静态压力载荷以及由气泡失稳引起的水射流载荷等,采用数值仿真与理论手段进行深入分析。
结果显示,在近场水下爆炸下,由舷侧外板形成的飞向舱室内爆的次生高速破片载荷仍具有很高的飞行速度,可对舱室内部结构及设备形成二次打击,基于改进的泰勒平板理论的计算方法可用于评估高速破片的速度;舷侧外板在强冲击波载荷作用下形成破口后,后续的爆轰产物通过破口进入舱室内部可形成类似于“准静态压力载荷”,对内部舱室舱壁、甲板等构件形成整体大变形破坏模式,并引起构件连接处的撕裂破坏;舷侧外板形成破口后,首次发现破损舱室内部可遭受来自高速水流的二次毁伤破坏,高速水流的形成因素主要包含强冲击波载荷传播、爆轰产物膨胀和残余气泡的收缩失稳这3类。
所做研究可为后续水下近场爆炸下破损舱室内部载荷评估提供重要依据。

为探究不同长径比和不同计算压力下钛合金双层加筋圆柱壳优化设计方案的特性,建立钛合金双层加筋圆柱壳结构轻量化数学模型。
基于Matlab建立遗传算法主控程序,采用有限元软件ANSYS进行极限承载能力计算校核,并对比分析不同长径比和不同计算压力下钛合金单、双层加筋圆柱壳优化方案的差异。
结果显示,钛合金加筋圆柱壳优化设计存在2个临界计算压力,优化设计可分为3个优化类型,即极限承载能力约束控制优化设计的稳定性约束型、强度约束控制优化设计的强度约束型以及强度和极限承载能力约束共同控制优化设计的共同约束型。长径比越大,临界计算压力越大;在相同的计算压力和长径比下,双层壳优化方案的重量低于单层壳结构;在相同长径比下,双层壳优化设计的临界计算压力小于单层壳。
研究成果可为钛合金双层加筋圆柱壳优化设计提供参考。
为分析双曲旋转薄壳的弯曲特性,基于欧拉−伯努利梁理论,将双曲旋转薄壳弯曲这一复杂的二维力学问题简化为一维壳带梁弯曲问题。
通过分析壳带梁受力及变形特点,建立结构力学模型;结合板壳弹性变形的物理方程以及单跨梁复杂弯曲微分方程,建立双曲旋转薄壳弯曲微分方程;选取跨中中面环向应力这一耐压结构常用的标志性应力,提出典型的应力计算经验公式;基于ANSYS开展双曲旋转薄壳弯曲问题仿真,验证典型应力计算公式的准确性。
结果显示,所提跨中中面环向应力计算经验公式的计算结果与数值仿真结果间的误差约为2.3%,表明该公式在预报典型应力方面具有较高的精度,验证了所提双曲旋转薄壳弯曲问题理论计算方法的正确性。
所提方法可为类似结构的设计与优化提供借鉴。
针对智能自主系统因组成要素解耦、系统状态多变、故障传播规律复杂等特点导致其任务可靠性难以准确评估的问题,提出一种基于多智能体的智能自主系统任务可靠性评估方法。
通过构建基于双层网络结构的可靠性仿真框架,实现智能自主系统信息传播过程和故障传播过程的分离表达与耦合关联;通过设计智能自主系统中各类组成元素的属性、行为与接口,搭建具备通用性的故障传播与状态切换机制;在分析智能自主系统任务可靠性影响要素的基础上,制定多阶段任务成功判据;基于Anylogic仿真平台,开发具备单次过程仿真与多次蒙特卡洛仿真能力的智能自主系统任务可靠性评估模型。
仿真结果表明,所提方法能够实现智能自主系统典型任务的可靠性定量评估,并能挖掘影响智能自主系统任务可靠性的关键故障因素。
所提方法可支撑智能自主系统任务可靠性量化评估与设计改进。

针对无人艇自主对接回收中实时位姿精准获取的问题,提出一种面向无人艇对接回收的STag标记视觉导引技术。
利用STag标记姿态稳定的特性,将其选作视觉导引中的基准标记。通过对无人艇摄像头视频流中STag标记的检测,结合摄像头的内部参数及STag标记的尺寸,融合EPnP及直接线性变换算法来解算回收装置与无人艇的相对位姿,并对其进行限幅滤波及一阶低通滤波处理,进而获得视线导引所需的横向偏距及航向偏差。
在静态性能测试中,目标检测的角度误差平均值为6.85°,距离误差平均值为0.056 m;在自主回收导引的湖上测试中,静态对接及动态对接的精度均在正负0.5 m内。
结果表明,相对于传统的无人艇对接回收方式,STag标记视觉导引可提高无人艇自主对接末端精度,提升整体回收成功率。

针对现有船舶行为识别方法在处理大规模海上船舶轨迹数据时存在效率低、准确性差等问题,提出一种基于轨迹特征图像建模与深度学习的船舶行为识别及分类方法,旨在快速、高效识别和分类船舶行为模式。
考虑船舶轨迹多尺度特征,提出船舶轨迹的自适应网格化处理方法,构建航速、加速度、航向、转向率和轨迹点密度等显著特征的视觉编码模型,实现船舶轨迹特征图像的样本生成和增强处理,进而采用卷积神经网络构建船舶行为分类识别模型,对不同船舶行为的轨迹图像样本集进行训练和验证。
实验结果表明,航速、转向率和轨迹点密度是区分直航、转向、机动徘徊、靠泊和锚泊等8种行为的最佳特征组合,基于轨迹特征图像的深度学习模型能显著提高船舶行为识别的质量和精度:召回率为90.99%,精确度为91.23%,F1分数为91.11%,准确率达到91.22%。
该方法可有效识别不同尺度轨迹数据的船舶行为,开展区域船舶行为的自动分类识别,结果可为水上交通智能管控提供决策支撑。

