



李学龙教授团队特邀封面文章:水下光学导引技术,深海图像获取与处理
中国电信李学龙教授主持完成的成果“深海影像探测关键技术装备与应用”获国家技术发明二等奖,成果围绕我国深海影像探测需求,攻克了深海影像复原增强、暗弱目标智能识别、极端环境耐压密封等关键难题,研制了我国首批全海深系列相机等多型涉水影像装备,为我国深海科学探索、深海资源开发等奠定了基础。
《光学学报》特邀李学龙教授团队基于国家技术发明奖撰写特邀论文,系统性介绍国家技术发明奖重点涉及的国内外在海洋探测和水下自主航行器(AUV)光学导引回收领域的最新进展。相关论文以“AUV水下回收光学导引”为题,被选为《光学学报》第12期封面文章。
封面解析
封面以海洋探测为背景,聚焦海洋中水下自主航行器(AUV)光学导引回收领域的前沿突破,包括多象限面阵光电探测、双目视觉定位、大视场畸变校正、视觉复原增强等水下光场信号处理的关键技术, AUV水下的光学定位精度和速度得到显著提高。水下光学导引技术的发展为AUV的能源补充、数据传输、指令下达提供了可靠的技术支撑,为AUV智能发展带来了新机遇。
文章链接:李学龙, 孙哲, 吴国俊. AUV水下回收光学导引(特邀)[J]. 光学学报, 2025, 45(12): 1200001.
1 背景介绍
深海导引对接有多难?深海吸收散射,图像信号模糊畸变;湍流扰动导致平台实时抖动,极大增加了深海图像获取与处理的难度。
AUV是人类探索海洋的重要工具之一,但AUV在深海作业后,如何精准对接回收站并补充能源、传输数据,是保障其连续作业的关键。声学导引作用距离远,但精度低,适合远距离初定位;光学导引具有高精度、高隐蔽性的优势,已成为末端导引的研究热点。

2 AUV水下回收光学导引研究进展
两大核心技术,让AUV“看”得更清、“算”得更准。
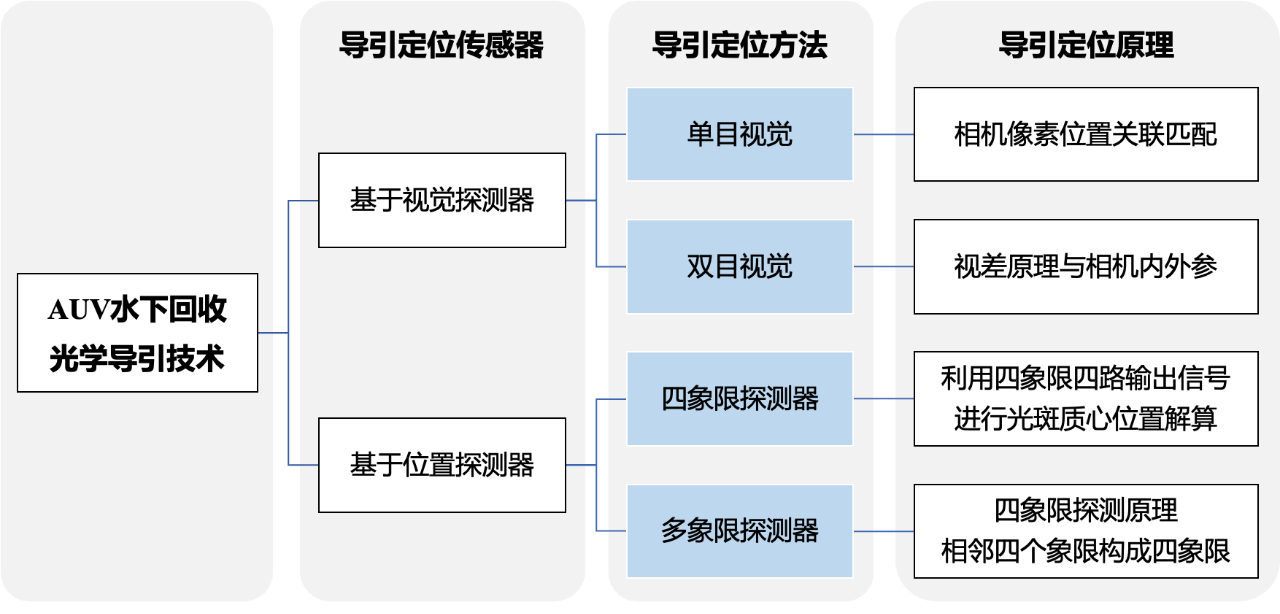
(1)基于图像传感器的视觉导引技术
基于图像传感器的光学导引原理是通过捕捉回收站笼口的主动或者被动标识物图像,利用图像的特征识别和透视几何计算AUV相对回收站的位置和姿态信息,具有导引标识形式不受限制、任务可扩展性强等优点。其中,被动标识通常使用二维码、几何形状图案等,具备唯一性,但可视距离近;主动标识则采用光信标、发射光信号,具有更高的可见性,可视距离远。然而,基于图像传感器的水下光学导引在实际应用中面临水下光场退化畸变、信标特征表征退化、跨域解算泛化受限等挑战。水下光场在传输过程中呈现非均匀衰减特性,水体介质对光的吸收与散射,导致AUV图像传感器捕获图像出现几何失真、对比度降低,有效探测范围缩短;水下信标纹理单一,受光场能量空间再分布影响,水下信标特征点提取与匹配难,进一步增加了基于图像传感器的水下光学导引难度;水下光场的折射率与盐度、浊度参数存在强耦合效应,导致成像系统在不同区域的位姿解算误差呈非线性变化,使水下光学导引算法的泛化性受限。
李学龙教授团队基于水下光场调控理论,构建了融合偏振成像与动态曝光的双目视觉光学导引系统,实现了复杂涉水视觉环境中的高精度目标定位。建立了偏振差分成像的水下目标增强模型,构建Stokes矢量空间的水下光场解算体系,通过多偏振通道信息融合,有效抑制散射噪声,显著目标对比度。设计了基于光场强度分布的自适应曝光控制策略,通过建立距离-曝光时间标定曲线,实现了动态曝光补偿,显著提升了水下光学导引系统的环境适应性和定位精度。
(2)基于位置传感器的光学导引技术
基于位置探测器的光学导引原理是利用光学信号处理方法,确定光斑在位置探测器光敏面上的质心位置,进而实现目标精确定位的技术。该技术主要应用在两个方面,一方面是激光照射待测目标后,位置探测器通过检测反射光斑在光敏面的位置变化,计算其质心移动,从而精确计算被测目标的线位移或角位移。另一方面是位置探测器解算出的光斑质心位置,为电机或快速反射镜等执行机构提供脱靶量,实现实时动态跟踪。这两方面应用的核心都是对照射到位置探测器的光斑质心进行实时测量,因此光电位置探测器的光斑位置检测性能对测量精度十分重要。常用的光电位置探测器包括位置敏感探测器,电荷耦合器件和四象限光电探测器。其中,四象限光电探测器是将一块光电探测器按照笛卡尔坐标系分成四块,对应探测器的四个象限,利用光刻技术制备的。当入射光斑落入光敏面的不同位置时,各象限会输出不同强度的电信号,通过处理四个象限输出的信号强度,可以确定光敏面上入射光斑的质心位置,具有检测分辨率高、响应时间短等优势,常用于光电测控通信领域。
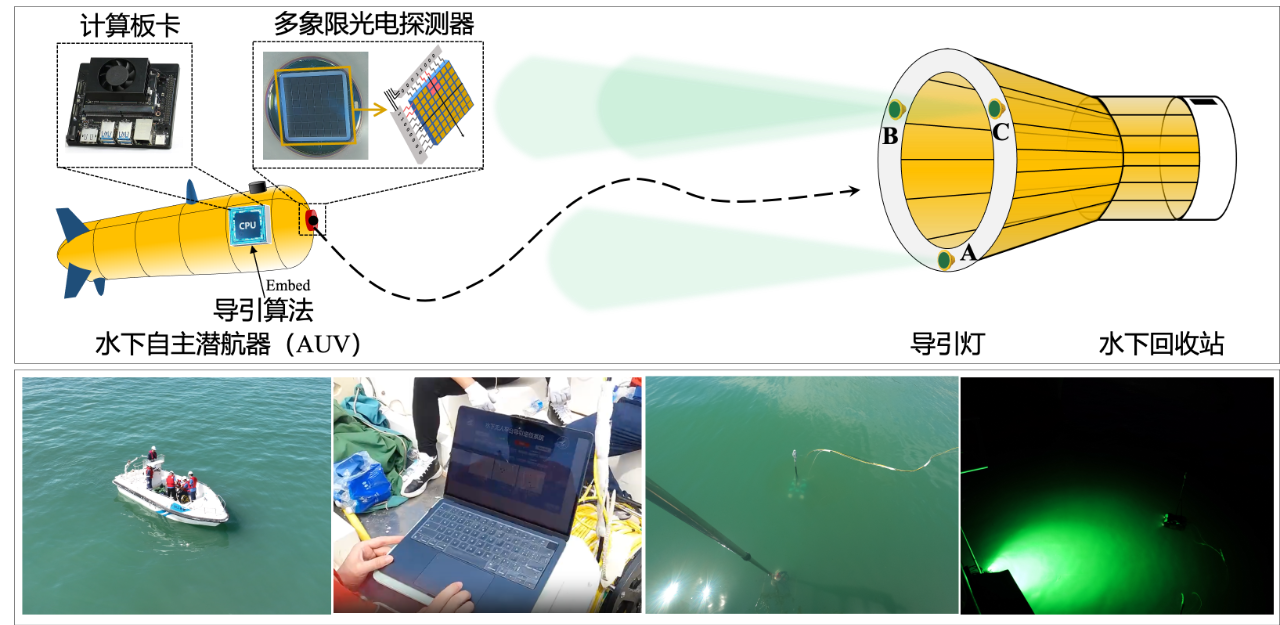
李学龙教授团队创新性提出了智能光电探测导引硬件与算法一体化设计的多象限测角光学导引定位方法,采用硬件-算法协同优化架构,通过多象限光电传感器阵列与深度学习技术的深度融合,实现了AUV水下回收的大视场高精度光学导引定位。通过对绝对坐标误差进行计算和统计,AUV 位置坐标解算速度5.650 ms/次,定位解算频率从30 Hz提升到170 Hz,坐标解算误差均值为58.292 mm@0.8∼20 m,最佳平均坐标解算误差从30 mm降低到7.2 mm@2∼3 m,保障了AUV水下回收99%的成功率。与现有光学导引方法相比,解算速度更快,算力功耗需求低,能量消耗少,为AUV完成能源补充、数据传输、指令下达,提供了可靠的导引回收方法,为复杂涉水视觉环境中AUV精准回收提供了新的技术范式。
3 总结与展望
基于图像传感器的光学导引方法信息获取直观、定位精度高,是目前AUV水下回收光学导引的主流方法;基于位置探测器的光学导引方法探测速率高、定位精度高,具备通信探测一体化的潜力。
面向未来海洋智能光电装备体系化发展需求,AUV水下回收光学导引技术的革新亟待突破三大核心方向:智能算法架构升级、通信感知范式重构,以及多模态协同感知体系构建。在海洋作业智能化进程加速的背景下,亟需构建具备自主决策能力、高频实时响应特性和多源融合优势的新一代水下智能导引系统,为深远海无人装备集群化作业提供关键技术支撑。
作者简介

李学龙,中国电信集团 CTO、首席科学家,中国电信人工智能研究院 (TeleAI) 院长。长期从事光学成像与图像处理研究,关注涉水光学的基础理论,在深海相机与智能处理方面做出原创性工作,应用于我国深海探测领域多项型号任务。入选SPIE Fellow (2010)、OSA Fellow (2012)、IEEE Fellow (2012)、AAAI Fellow、AAAS Fellow、ACM Fellow、欧洲科学院院士。曾任中国科学院西安光学精密机械研究所副所长、瞬态光学与光子技术国家重点实验室副主任,创立陕西省海洋光学重点实验室、西北工业大学光电与智能研究院、智能光电与交互工信部重点实验室。《光学学报》编委。曾获首届全国创新争先奖、国家技术发明二等奖、国家自然科学二等奖、何梁何利奖、王大珩光学奖、陈嘉庚青年科学奖、科学探索奖,及省、部、学会一等奖13项。