车载三维激光雷达外参数的分步自动标定算法  下载: 1471次
下载: 1471次
Step-By-Step Automatic Calibration Algorithm for Exterior Parameters of 3D Lidar Mounted on Vehicle
吉林大学汽车仿真与控制国家重点实验室, 吉林 长春 130022
图 & 表
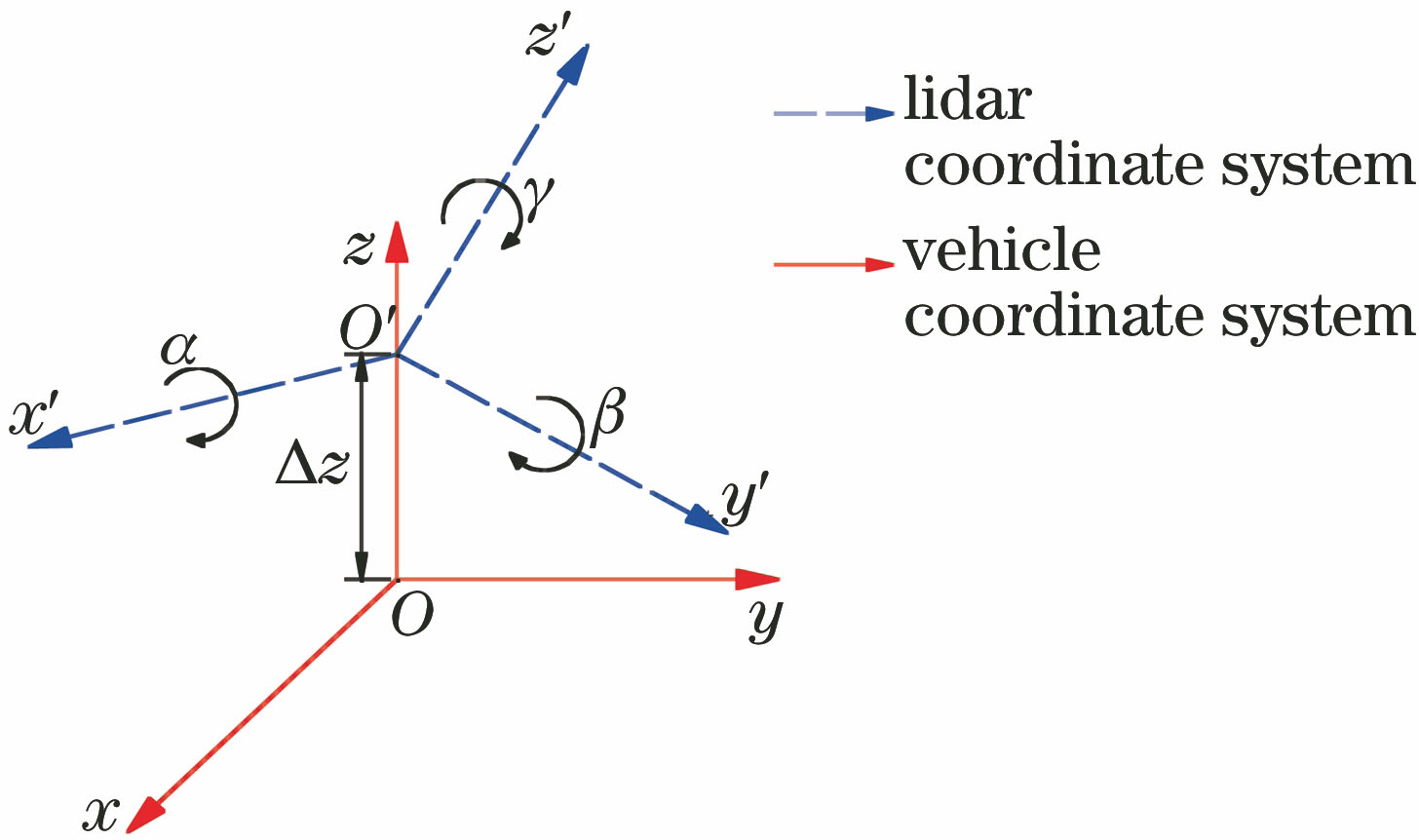
图 1. 激光雷达坐标系与车体坐标系的相对位置
Fig. 1. Relative position of lidar coordinate system and vehicle coordinate system
下载图片 查看原文
图 2. 未标定的激光雷达坐标系
Fig. 2. Uncalibrated lidar coordinate system
下载图片 查看原文
图 3. 第2步标定算法原理。(a)标定杆聚类中心;(b)以激光雷达坐标系为参照的多帧同一标定杆聚类中心
Fig. 3. The second step calibration algorithm principle. (a) Clustering center of calibration rod; (b) multi-frame same calibration rod clustering center with reference to the lidar coordinate system
下载图片 查看原文
图 4. 标定误差
Fig. 4. Calibration error
下载图片 查看原文
图 5. 地面水平度函数f值
Fig. 5. Ground levelness function f value
下载图片 查看原文
图 6. 地面点云的提取
Fig. 6. Extraction of ground point cloud
下载图片 查看原文
图 7. 第1步标定结果
Fig. 7. Results of the first step calibration
下载图片 查看原文
图 8. 第2步标定场景图
Fig. 8. Scene of the second step calibration
下载图片 查看原文
图 9. 标定杆提取及聚类
Fig. 9. Calibration pole extraction and clustering
下载图片 查看原文
图 10. 第2步标定结果
Fig. 10. Results of the second step calibration
下载图片 查看原文
表 1仿真中选取的PSO参数
Table1. PSO parameters selected in simulation
| Parameter | Content | Value |
|---|
| Nmax | Maximum number of iteration | 200 | | Np | Number of particles | 40 | | E0 | Threshold of f value | 10-5 | | C1 | Individual learning factor | 2.0 | | C2 | Social learning factor | 2.0 | | W | Inertia weight | 0.6 | | vmax | Maximum flight speed | 0.8 |
|
查看原文
表 2多次仿真的结果
Table2. Results of multiple simulation
| Number of experiment | Parameter | Target value | Experimental value | Deviation | f value | Number of iteration |
|---|
| α /(°) | 5.0 | 5.0008 | 0.0008 | | | | 1 | β /(°) | 1.0 | 0.9963 | 0.0037 | 1.824×10-6 | 61 | | Δz /m | 1.0 | 1.0001 | 0.0001 | | | | α /(°) | 7.5 | 7.5037 | 0.0037 | | | | 2 | β /(°) | 1.8 | 1.7847 | 0.0153 | 1.778×10-6 | 58 | | Δz /m | 1.4 | 1.3998 | 0.0002 | | | | α /(°) | 10.0 | 10.0094 | 0.0094 | | | | 3 | β /(°) | 2.5 | 2.4621 | 0.0379 | 1.934×10-6 | 71 | | Δz /m | 1.7 | 1.7004 | 0.0004 | | |
|
查看原文
表 3调整的PSO参数
Table3. Adjusted PSO Parameters
| Parameter | Content | Value |
|---|
| Nmax | Maximum number of iteration | 500 | | Np | Number of particles | 60 | | E0 | Threshold of f value | 10-8 |
|
查看原文
陈贵宾, 高振海, 何磊. 车载三维激光雷达外参数的分步自动标定算法[J]. 中国激光, 2017, 44(10): 1010004. Chen Guibin, Gao Zhenhai, He Lei. Step-By-Step Automatic Calibration Algorithm for Exterior Parameters of 3D Lidar Mounted on Vehicle[J]. Chinese Journal of Lasers, 2017, 44(10): 1010004.













 PDF全文
PDF全文

