基于多对点云匹配的三维激光雷达外参数标定  下载: 1722次
下载: 1722次
Calibration of Three-Dimensional Lidar Extrinsic Parameters Based on Multiple-Point Clouds Matching
中国人民解放军军事交通学院研究生管理大队, 天津 300161
图 & 表
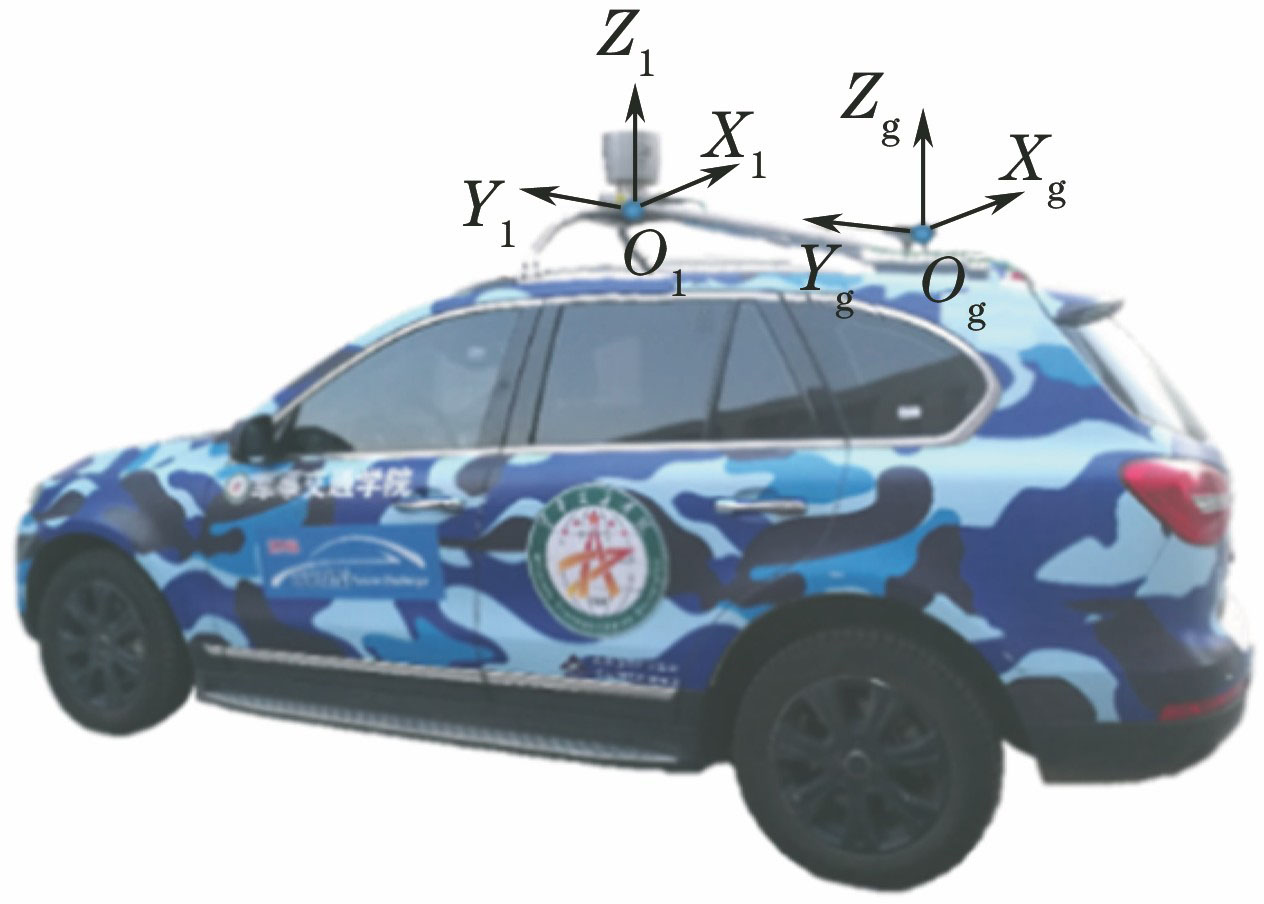
图 1. 实验平台
Fig. 1. Experimental platform
下载图片 查看原文
图 2. 程序流程图
Fig. 2. Program flow diagram
下载图片 查看原文
图 3. 车辆轨迹图
Fig. 3. Vehicle trajectory diagram
下载图片 查看原文
图 4. 标定前两个标定场景的点云叠加图。(a) 1号标定场景;(b) 2号标定场景
Fig. 4. Two scene point cloud overlay maps before calibration. (a) Calibration scene 1; (b) calibration scene 2
下载图片 查看原文
图 5. 2号标定场景中几个主要外参数及目标函数随迭代次数的变化情况。(a) x;(b) y;(c) θyaw;(d) J
Fig. 5. Variation of several main extrinsic parameters and objective function with the number of iterations in calibration scene 2. (a) x; (b) y; (c) θyaw; (d) J
下载图片 查看原文
图 6. 2号标定场景迭代过程图。(a)初始范围;(b)迭代过程点;(c)迭代中心移动后范围
Fig. 6. Iteration process diagrams in calibration scene 2. (a) Initial range; (b) points of the iteration process; (c) range after moving the iteration center
下载图片 查看原文
图 7. 标定后两个场景的点云叠加图。(a) 1号标定场景;(b) 2号标定场景
Fig. 7. Two scene point cloud overlay maps after calibration. (a) Calibration scene 1; (b) calibration scene 2
下载图片 查看原文
表 11号标定场景不同步长和步数条件的标定结果
Table1. Calibration results using different step lengths and different step counts in calibration scene 1
| Steplength | Stepcount | x /cm | y /cm | θyaw /(°) | θpitch /(°) | θroll /(°) | J /cm2 | Time cost /min |
|---|
| 20 cm & 2° | 1 | 7.460 | 124.336 | -0.520 | 0.070 | -0.089 | 25.3404 | 3.96 | | 2 | 7.422 | 124.434 | -0.546 | 0.064 | -0.088 | 25.3363 | 16.35 | | 15 cm & 1.5° | 1 | 8.086 | 123.906 | -0.061 | 0.073 | -0.094 | 25.3504 | 4.22 | | 2 | 8.005 | 123.972 | -0.508 | 0.070 | -0.082 | 25.3376 | 17.15 | | 10 cm & 1° | 1 | 7.461 | 124.336 | -0.520 | 0.070 | -0.089 | 25.3404 | 3.85 | | 3 | 7.227 | 124.180 | -0.541 | 0.070 | -0.084 | 25.3387 | 41.56 | | 5 cm & 0.5° | 1 | 7.461 | 124.336 | -0.519 | 0.070 | -0.089 | 25.3404 | 3.53 | | 6 | 7.227 | 124.180 | -0.541 | 0.070 | -0.084 | 25.3387 | 235.26 | | 2 cm & 0.2° | 1 | 7.609 | 124.633 | -0.489 | 0.075 | -0.086 | 25.3352 | 4.05 | | 15 | - | - | - | - | - | - | - |
|
查看原文
表 22号标定场景的标定结果
Table2. Calibration results in calibration scene 2
| Calibration | x /cm | y /cm | θyaw /(°) | θpitch /(°) | θroll /(°) | J /cm2 |
|---|
| Before calibration | 0 | 0 | 0 | 0 | 0 | 31.223 | | After calibration (n=1) | 8.154 | -16.826 | 0.0305 | -0.021 | 0.016 | 30.363 | | After calibration (n=5) | 7.578 | 123.945 | -0.5070 | 0.071 | -0.081 | 25.339 |
|
查看原文
表 3不同初始迭代中心标定结果的均值与方差
Table3. Mean value and standard deviation of calibration results for different initial iteration centers
| Item mean standard | x /cm | y /cm | θyaw /(°) | θpitch /(°) | θroll /(°) |
|---|
| Mean value | 7.5840 | 124.1520 | -0.4980 | 0.0910 | -0.0900 | | Standard deviation | 0.4536 | 0.6364 | 0.0075 | 0.0049 | 0.0037 |
|
查看原文
韩栋斌, 徐友春, 王任栋, 齐尧, 李华. 基于多对点云匹配的三维激光雷达外参数标定[J]. 激光与光电子学进展, 2018, 55(2): 022803. Dongbin Han, Youchun Xu, Rendong Wang, Yao Qi, Hua Li. Calibration of Three-Dimensional Lidar Extrinsic Parameters Based on Multiple-Point Clouds Matching[J]. Laser & Optoelectronics Progress, 2018, 55(2): 022803.










 PDF全文
PDF全文

