三维激光雷达在无人车环境感知中的应用研究  下载: 3349次
下载: 3349次
Application Research of There-Dimensional LiDAR in Unmanned Vehicle Environment Perception
1 陆军工程大学石家庄校区车辆与电气工程系, 河北 石家庄 050003
2 中国人民解放军63963部队, 北京 100072
图 & 表
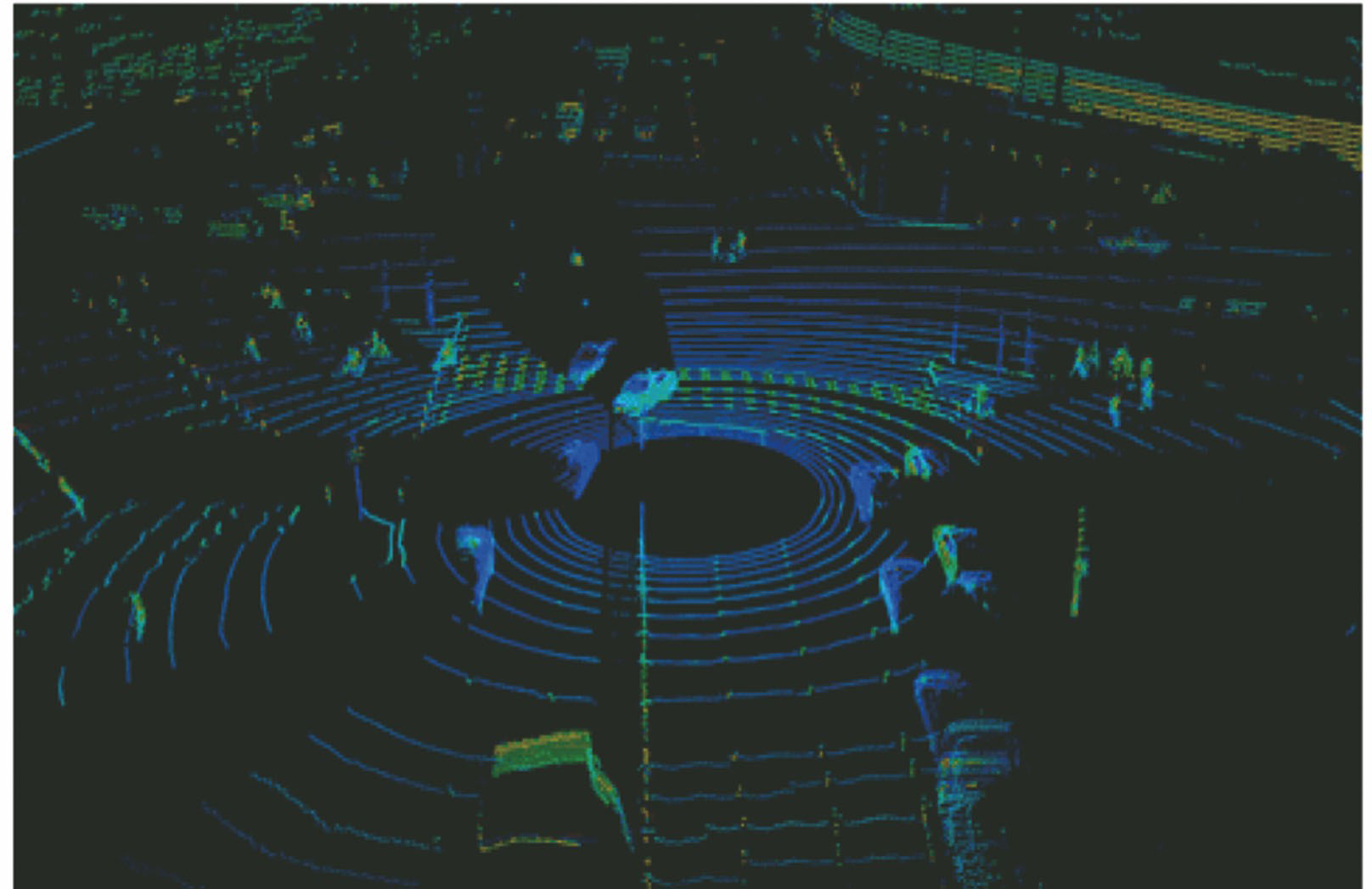
图 1. 三维激光雷达点云图
Fig. 1. Point clouds of 3D LiDAR
下载图片 查看原文
图 2. 障碍物检测基本原理
Fig. 2. Basic principle of obstacle detection
下载图片 查看原文
图 3. 三维激光雷达扫描特性
Fig. 3. 3D LiDAR scanning characteristics
下载图片 查看原文
图 4. 基于3D FCN的车辆检测网络结构
Fig. 4. Vehicle detection network structure based on 3D FCN
下载图片 查看原文
图 5. PointNet网络架构
Fig. 5. Network structure of PointNet
下载图片 查看原文
图 6. VoxelNet网络架构
Fig. 6. Network structure of VoxelNet
下载图片 查看原文
图 7. KITTI数据集采集平台
Fig. 7. Collection platform of KITTI dataset
下载图片 查看原文
图 8. Apollo Scape数据采集平台
Fig. 8. Collection platform of ApolloScape dataset
下载图片 查看原文
张银, 任国全, 程子阳, 孔国杰. 三维激光雷达在无人车环境感知中的应用研究[J]. 激光与光电子学进展, 2019, 56(13): 130001. Yin Zhang, Guoquan Ren, Ziyang Cheng, Guojie Kong. Application Research of There-Dimensional LiDAR in Unmanned Vehicle Environment Perception[J]. Laser & Optoelectronics Progress, 2019, 56(13): 130001.










 PDF全文
PDF全文

